HIWIN直线导轨选型(一)
日期:2011-11-7 11:21:29 点击:
来源:网络
作者: 未知
来源:网络
作者: 未知
点击【 大 中 小 】放大字体.
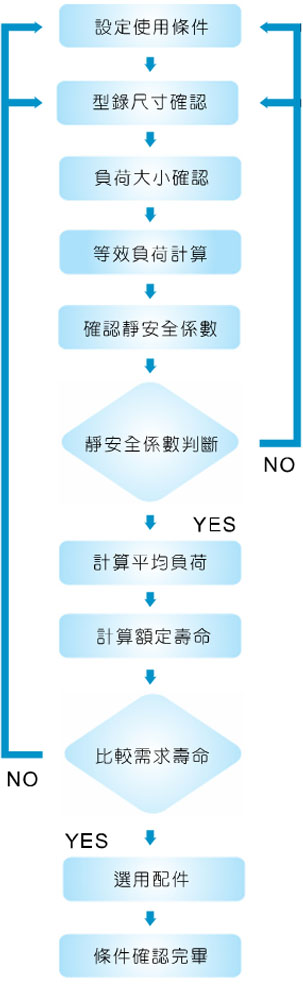
线性运动系统由于使用方式种类多,设计需求上各自有所不同。而直线导轨使用寿命长短依据许多变数,如使用负荷、使用速度、设计尺寸等种种使用因素,而这些变数参考孰重孰轻,往往造成初接触直线导轨的使用者陷入如何选用的无穷回圈之中,所以使用标准的选用流程可让使用者避免选用规格错误或是花费太多比较设计变数权重的时间。以下是本公司建议的标准选用流程。
2-1选用线性滑轨之流程图
2-2确认使用条件
选用线性滑轨通常需要计算负荷,其必要的条件需要得知:
A.组合(跨距尺寸、滑块个数、滑轨根数)。
B.安装姿势(水平、竖、倾斜、壁挂、吊下)。
C.作用负荷(作用力的大小、方向、作用点、加速下是否产生惯性?)。
D.使用频率(负荷周期)。
A.组合:
1.跨距尺寸:
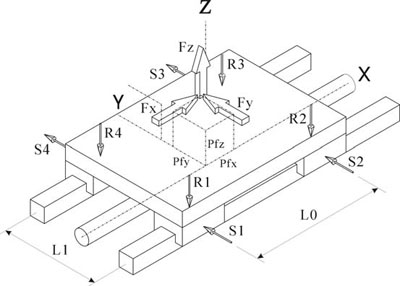
滑座之间的相互尺寸,如上图所示之 L0与 L1。
L0:为机构上单支滑轨上滑座之间的距离(单位:mm)。
L1:为机构上双支滑轨之间的距离(单位:mm)。
L0与 L1之尺寸大小容易影响整组线性滑轨组合的刚性与使用寿命。
2. 滑块个数:
同一支滑轨上所使用的滑座数量。
上图为一支滑轨使用 2个滑座。
通常单支使用滑座数量多,则抵抗负重的能力与刚性都会增加。
寿命也越高,但是使用的空间与移动行程则需要重新被考虑。
3. 滑轨根数:
组合所使用的滑轨数量。
上图为使用 2支滑轨的组合。
通常滑轨数目增加可以增加组合的滑块个数,也可以增加 X轴的力矩抵抗,刚性与寿命也会提升。
B.安装姿势:
1.水平安装
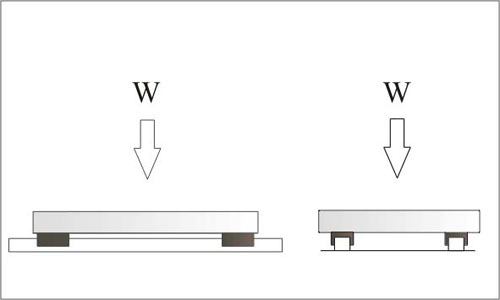
水平安装(W为地心引力方向) 此为最常使用之组立方式,较能承受正向压力,常用在一般的机台定位和送料机构上。通常承受的方式如图所示。 W为重力方向指标,重力方向与滑座托盘平面成垂直。也与滑座移动方向成垂直。
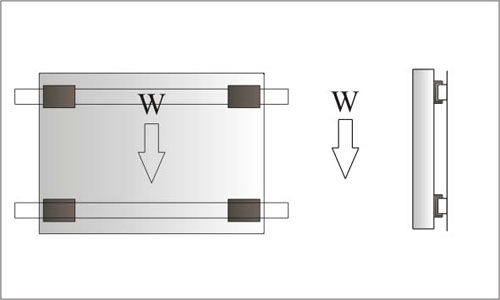
2.竖立安装

竖立安装(W为地心引力方向) 选用上需要考虑滑座的跨距与承受力距的能力,重力方向与滑座托盘平面平行,也与滑座移动方向平行。常用在一般如升降机之类的机构上。使用上需要注意承受力之位置与大小造成的力矩。
3.倾斜安装

倾斜安装(W为地心引力方向) 又分为侧倾斜安装及前倾斜安装。左图为侧倾斜安装。侧倾斜安装:重力方向与托盘平面成一角度
θ,与移动方向成垂直。前倾斜安装:重力方向与托盘平面成垂直,与移动方向成一角度θ。
4.挂壁安装
挂壁安装(W为地心引力方向) 使用方式与竖立安装相似,与滑座平面平行,但与滑座移动方向成垂直,主要受重力造成的力矩,所以大多用输送设备,但是选用上与竖立的方式相同,需多考虑力矩问题,所以空间跨距和滑座受力需要多被考虑。
C.作用负荷:
作用负荷所需要的之必要条件:
1.作用负荷之大小,可以分为:
物体质量:
所荷重物体本身的重量。
外力:
所受其他机构造成的外力。
可以有数个外力对组立机构造成负荷,所以可将所有分力合成为一个合力下去计算。
计算可以简便许多。
2.作用负荷之方向:
可以将合成之后的外力分成 XYZ3 轴向的分力。
如右图之 Fx、Fy、Fz。
Fx为合力之 X轴向之分布力。
Fy为合力之 Y轴向之分布力。
Fz为合力之 Z轴向之分布力。
3. 作用负荷之位置点:
如右图:XYZ之原点都以推力中心做起点。
推力中心可以为滚珠螺杆、油压缸甚至线性马达。
易言之,就是驱动滑座组之动力来源,以此点为起始点,合力的位置点的 XYZ相对位置就可以被定义出来。
Pfx:为合力与推力中心之 X方向距离。
Pfy:为合力与推力中心之 Y方向距离。
Pfz:为合力与推力中心之 Z方向距离。
4. 跨距:
L0与 L1指滑座与滑座之间的距离。(如右图所示)。
5.速度图:
最高速度(V):即机械运转时的最高运动速度。
如右图之 V,即是整个运
作过程中最高速度。
行程长度:
行程长度如右图之距离分布(D)
加速距离(D1):由静止加速至最高速度
等速距离(D2):等速度移动距离。
减速距离(D3):由最高速度减速至静止的距离。
6. 滑座各方向受力:
R1、R2、R3、R4为各别滑座之正向受力。 S1、S2、S3、S4为各别滑座之侧向受力。其受力影响与计算方式将于负荷计算将有明确的介绍。
2-3型式尺寸确认
1.使用合适的型式(BGX、BGC)
依组装使用之机器设备选用合适之系列产品类别。
相关选用参考请见后续本公司 BGX、BGC等各系列产品的介绍。
2 .假定合适的尺寸(15、20、25、30、35型)
基本上可依照流程使用条件,先假设一个较符合实际需要的滑座。
建议先以尺寸需要为优先,受力负荷为次之的考虑下去设计,因为在初期计算时较难判断受力与寿命问题,有时候可以负载不代表寿命也符合实际需求,所以可以先以尺寸为第一个考虑重点,等到计算寿命与负荷时的数值与实际需要有一段落差时,在往承受负荷较稳健的型号下去选用滑座。
2-4负荷大小确认
滑座所受的垂直分力:

滑座所受的侧向分力:

计算范例 :

这个范例被区分为三部分
第一部分取决于 W(重量) Fx(W):(W/g)*( A)(加速度)- Fx(A)
第二部分取决于 W(重量) Fx(W):
第三部分取决于 W(重量) Fx(W):(W/g)*(-A)(加速度)- Fx(-A)
若线性滑轨系统采用: BGXH20FN2 L4000 NZ0
C = 1463 kgf
C0 = 3110 kgf
D1 = 1000 mm
D2 = 2000 mm 2 . D1
D3 = 1000 mm
V = 1 m/s V0 = 0 m/s => (A) = 0.5 m/s2 加速度
V = 0 m/s V0 = 1 m/s => (-A) = -0.5 m/s2 减速度
Fx(W) = 98 kgf
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
2-1选用线性滑轨之流程图
P.L.C.技.术.网——可编程控制器技术门户
WWW_PLCJS_COM-PLC-技.术_网
——可——编——程——控-制-器-技——术——门——户
P.L.C.技.术.网——可编程控制器技术门户
WWW_P※LCJS_CO※M-PLC-技-.术_网
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WW.W_PLCJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
2-2确认使用条件
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_PL※CJS_COM-PLC-技.术_网
选用线性滑轨通常需要计算负荷,其必要的条件需要得知:
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
A.组合(跨距尺寸、滑块个数、滑轨根数)。
WWW_PLC※JS_COM-PmLC-技.术_网
B.安装姿势(水平、竖、倾斜、壁挂、吊下)。
WWW_P※LCJS_COM-PLC-)技.术_网
C.作用负荷(作用力的大小、方向、作用点、加速下是否产生惯性?)。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
D.使用频率(负荷周期)。
WWW_PLCJS@_COM%-PLC-技.术_网
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_P※LCJS_COM-PLC-)技.术_网
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
——可——编——程——控-制-器-技——术——门——户
A.组合:
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
1.跨距尺寸:
WWW_P※LCJS_CO※M-PLC-技-.术_网
滑座之间的相互尺寸,如上图所示之 L0与 L1。
——可——编——程——控-制-器-技——术——门——户
L0:为机构上单支滑轨上滑座之间的距离(单位:mm)。
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
L1:为机构上双支滑轨之间的距离(单位:mm)。
W1WW_P4LCJS_COM-PLC-技.术_网
L0与 L1之尺寸大小容易影响整组线性滑轨组合的刚性与使用寿命。
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW_PL※CJS_COM-PLC-技.术_网
2. 滑块个数:
W1WW_P4LCJS_COM-PLC-技.术_网
同一支滑轨上所使用的滑座数量。
WWcW_PLCJS_COM-PLC-技.术_网
上图为一支滑轨使用 2个滑座。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
通常单支使用滑座数量多,则抵抗负重的能力与刚性都会增加。
WWW_PLCJS_COM-PLC-技.术_网
寿命也越高,但是使用的空间与移动行程则需要重新被考虑。
P.L.C.技.术.网——可编程控制器技术门户
WWcW_PLCJS_COM-PLC-技.术_网
3. 滑轨根数:
WWcW_PLCJS_COM-PLC-技.术_网
组合所使用的滑轨数量。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
上图为使用 2支滑轨的组合。
WWW_P※LCJS_CO※M-PLC-技-.术_网
通常滑轨数目增加可以增加组合的滑块个数,也可以增加 X轴的力矩抵抗,刚性与寿命也会提升。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_P※LCJS_COM-PLC-)技.术_网
B.安装姿势:
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW_PLC※JS_COM-PmLC-技.术_网
1.水平安装
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_P※LCJS_COM-PLC-)技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
P.L.C.技.术.网——可编程控制器技术门户
WWW.PLCJS.COM——可编程控制器技术门户
水平安装(W为地心引力方向) 此为最常使用之组立方式,较能承受正向压力,常用在一般的机台定位和送料机构上。通常承受的方式如图所示。 W为重力方向指标,重力方向与滑座托盘平面成垂直。也与滑座移动方向成垂直。
WWW.PLCJS.COM——可编程控制器技术门户
——可——编——程——控-制-器-技——术——门——户
2.竖立安装
WW.W_PLCJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW_PLCJS@_COM%-PLC-技.术_网
竖立安装(W为地心引力方向) 选用上需要考虑滑座的跨距与承受力距的能力,重力方向与滑座托盘平面平行,也与滑座移动方向平行。常用在一般如升降机之类的机构上。使用上需要注意承受力之位置与大小造成的力矩。
WWW_P※LCJS_CO※M-PLC-技-.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
3.倾斜安装
plcjs.技.术_网
——可——编——程——控-制-器-技——术——门——户
WWW.PLCJS.COM——可编程控制器技术门户
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WWW_PLCJS@_COM%-PLC-技.术_网
倾斜安装(W为地心引力方向) 又分为侧倾斜安装及前倾斜安装。左图为侧倾斜安装。侧倾斜安装:重力方向与托盘平面成一角度
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
θ,与移动方向成垂直。前倾斜安装:重力方向与托盘平面成垂直,与移动方向成一角度θ。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_PL※CJS_COM-PLC-技.术_网
4.挂壁安装
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
plcjs.技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
plcjs.技.术_网
挂壁安装(W为地心引力方向) 使用方式与竖立安装相似,与滑座平面平行,但与滑座移动方向成垂直,主要受重力造成的力矩,所以大多用输送设备,但是选用上与竖立的方式相同,需多考虑力矩问题,所以空间跨距和滑座受力需要多被考虑。
WWW_PL※CJS_COM-PLC-技.术_网
WWW_P※LCJS_COM-PLC-)技.术_网
P.L.C.技.术.网——可编程控制器技术门户
C.作用负荷:
WW.W_PLCJS_COM-PLC-技.术_网
P.L.C.技.术.网——可编程控制器技术门户
作用负荷所需要的之必要条件:
WWW_PLCJS_COM-PLC-技.术_网
WW.W_PLCJS_COM-PLC-技.术_网
1.作用负荷之大小,可以分为:
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
物体质量:
WWW.PLCJS.COM——可编程控制器技术门户
所荷重物体本身的重量。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW.PLCJS.COM——可编程控制器技术门户
外力:
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
所受其他机构造成的外力。
P.L.C.技.术.网——可编程控制器技术门户
可以有数个外力对组立机构造成负荷,所以可将所有分力合成为一个合力下去计算。
W1WW_P4LCJS_COM-PLC-技.术_网
计算可以简便许多。
P.L.C.技.术.网——可编程控制器技术门户
WWW.PLCJS.COM——可编程控制器技术门户
2.作用负荷之方向:
plcjs.技.术_网
可以将合成之后的外力分成 XYZ3 轴向的分力。
WWcW_PLCJS_COM-PLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
如右图之 Fx、Fy、Fz。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
Fx为合力之 X轴向之分布力。
WW.W_PLCJS_COM-PLC-技.术_网
Fy为合力之 Y轴向之分布力。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
Fz为合力之 Z轴向之分布力。
WWW_PLCJS@_COM%-PLC-技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
3. 作用负荷之位置点:
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
如右图:XYZ之原点都以推力中心做起点。
WWW_PLC※JS_COM-PmLC-技.术_网
推力中心可以为滚珠螺杆、油压缸甚至线性马达。
WWW_PLCJS_COM-PLC-技.术_网
易言之,就是驱动滑座组之动力来源,以此点为起始点,合力的位置点的 XYZ相对位置就可以被定义出来。
W1WW_P4LCJS_COM-PLC-技.术_网
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
Pfx:为合力与推力中心之 X方向距离。
——可——编——程——控-制-器-技——术——门——户
Pfy:为合力与推力中心之 Y方向距离。
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
Pfz:为合力与推力中心之 Z方向距离。
WWW_P※LCJS_COM-PLC-)技.术_网
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WW.W_PLCJS_COM-PLC-技.术_网
4. 跨距:
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
L0与 L1指滑座与滑座之间的距离。(如右图所示)。
WWW_PLCJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
5.速度图:
WW.W_PLC※JS_C,OM-PL,C-技.术_网
最高速度(V):即机械运转时的最高运动速度。
W1WW_P4LCJS_COM-PLC-技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
如右图之 V,即是整个运
WWcW_PLCJS_COM-PLC-技.术_网
作过程中最高速度。
WWW_PLCJS@_COM%-PLC-技.术_网
P.L.C.技.术.网——可编程控制器技术门户
行程长度:
——可——编——程——控-制-器-技——术——门——户
行程长度如右图之距离分布(D)
WW.W_PLC※JS_C,OM-PL,C-技.术_网
加速距离(D1):由静止加速至最高速度
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
等速距离(D2):等速度移动距离。
plcjs.技.术_网
plcjs.技.术_网
减速距离(D3):由最高速度减速至静止的距离。
WWW_PL※CJS_COM-PLC-技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
WWW_PLCJS@_COM%-PLC-技.术_网
6. 滑座各方向受力:
WWW_PL※CJS_COM-PLC-技.术_网
R1、R2、R3、R4为各别滑座之正向受力。 S1、S2、S3、S4为各别滑座之侧向受力。其受力影响与计算方式将于负荷计算将有明确的介绍。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
——可——编——程——控-制-器-技——术——门——户
P.L.C.技.术.网——可编程控制器技术门户
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_PLC※JS_COM-PmLC-技.术_网
2-3型式尺寸确认
WWW_PL※CJS_COM-PLC-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
1.使用合适的型式(BGX、BGC)
WWcW_PLCJS_COM-PLC-技.术_网
依组装使用之机器设备选用合适之系列产品类别。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
相关选用参考请见后续本公司 BGX、BGC等各系列产品的介绍。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WW.W_PLC※JS_C,OM-PL,C-技.术_网
2 .假定合适的尺寸(15、20、25、30、35型)
WWW_PLCJS@_COM%-PLC-技.术_网
基本上可依照流程使用条件,先假设一个较符合实际需要的滑座。
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
建议先以尺寸需要为优先,受力负荷为次之的考虑下去设计,因为在初期计算时较难判断受力与寿命问题,有时候可以负载不代表寿命也符合实际需求,所以可以先以尺寸为第一个考虑重点,等到计算寿命与负荷时的数值与实际需要有一段落差时,在往承受负荷较稳健的型号下去选用滑座。
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WWW_PLCJS@_COM%-PLC-技.术_网
WWW_PLCJS_COM-PLC-技.术_网
P.L.C.技.术.网——可编程控制器技术门户
W1WW_P4LCJS_COM-PLC-技.术_网
2-4负荷大小确认
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
W1WW_P4LCJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
滑座所受的垂直分力:
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
P.L.C.技.术.网——可编程控制器技术门户
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
滑座所受的侧向分力:
WW.W_PLCJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW_PLC※JS_COM-PmLC-技.术_网
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WW.W_PLCJS_COM-PLC-技.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
计算范例 :
WW.W_PLC※JS_C,OM-PL,C-技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
plcjs.技.术_网
WW.W_PLCJS_COM-PLC-技.术_网
这个范例被区分为三部分
WW.W_PLC※JS_C,OM-PL,C-技.术_网
第一部分取决于 W(重量) Fx(W):(W/g)*( A)(加速度)- Fx(A)
WWcW_PLCJS_COM-PLC-技.术_网
第二部分取决于 W(重量) Fx(W):
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
第三部分取决于 W(重量) Fx(W):(W/g)*(-A)(加速度)- Fx(-A)
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PL※CJS_COM-PLC-技.术_网
若线性滑轨系统采用: BGXH20FN2 L4000 NZ0
WWcW_PLCJS_COM-PLC-技.术_网
C = 1463 kgf
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
C0 = 3110 kgf
WWW.PLCJS.COM——可编程控制器技术门户
D1 = 1000 mm
WWW_PLCJS@_COM%-PLC-技.术_网
D2 = 2000 mm 2 . D1
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
D3 = 1000 mm
W1WW_P4LCJS_COM-PLC-技.术_网
V = 1 m/s V0 = 0 m/s => (A) = 0.5 m/s2 加速度
plcjs.技.术_网
V = 0 m/s V0 = 1 m/s => (-A) = -0.5 m/s2 减速度
P.L.C.技.术.网——可编程控制器技术门户
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
Fx(W) = 98 kgf
上一篇: 关于风量及计算下一篇: HIWIN滚珠丝杠的使用
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行