基于仿生群体协同的集群智能控制研究
日期:2010-4-12 13:34:36 点击:
来源:中国工控网
作者:
来源:中国工控网
作者:
点击【 大 中 小 】放大字体.
1 引言
智能控制技术是针对被控对象及其环境和任务的复杂多变,不确定性而提出的。现在基于计算机科学、人工智能、信息科学、思维科学、认知科学和人工神经网络等多学科的交叉,已从不同角度奠定了智能控制的理论和技术基础。智能控制的核心是高层控制,其任务在于对实际环境或过程进行决策和规划实现广义问题求解;同时具有用知识表示的非数学的广义模型和数学模型表示的混合控制过程。智能控制正处于发展过程中,还有许多问题有待进一步研究和完善。例如智能控制的模型、算法以及智能控制系统中常常存在不确定性,控制的可靠性和稳定性方面还有待完善。
目前国内外所研究的智能控制理论方法,一方面是从经典或现代控制理论向智能化发展,另外一方面是从人工智能的角度出发来解决控制问题;无论从哪个方面出发智能控制的模型是单纯的,而方法是单一的;这必然会对复杂系统的控制带来控制性能上的不足。集成融合、取长补短正是复杂系统控制所需要的,这也正是研究集群智能控制的原因所在。
2 生态智能群体行为
(1)生态群体行为的意义
自仿生学创立以来,人们不断地从生物进化的机理中得到启发,提出许多用于解决复杂优化问题的新方法并成功应用于解决实际问题。众所周知的蚂蚁、蜜蜂与其它完全群居昆虫的群体行为提供了一个显著证明,即由简单智能体构成的系统能够完成现实世界中的复杂任务。从仿生学的角度着,蚁群系统给我们很多启发,对蚁群系统的研究能为研究智能控制系统提供了一个新方法和新方向。
(2)智能群体行为的特点
虽然单个蚂蚁的智能很低,行为简单,但是由这些简单个体所组成的蚁群却表现出较高的智能和极其复杂的行为,能够完成复杂的任务。不仅如此蚁群能够在残酷的大自然中生存卞来,对环境的变化有很高的适应性。任何一个蚂蚁都有独立搬运食物、选择移动的路径以及和其他蚂蚁进行信息交互的能力。如果遇到无法独立完成的事情,可以通过信息的传递通知其他蚂蚁并协同其他蚂蚁完成任务。
(3)智能群体行为与集群智能控制
我们把蚁群系统与智能控制结合起来研究其中有密切关联的问题。蚂蚁与智能控制系统中的智能控制个体很相似,都有一定的智能。通过对蚁群系统的观察,我们可以把蚂蚁抽象为具有一定工作、路由选择、通信和协同能力的智能控制个体。这些智能控制系统中的智能控制个体智能有限,但通过协同工作却可以完成复杂的控制功能。所以我们希望通过研究和抽象蚁群系统中的蚂蚁来研究智能控制系统中的智能控制个体的性能,从而构成一种新型的集群智能控制系统。
3 集群智能控制模型
3.1 集群智能控制
集群智能控制的目标就是从仿生学的角度出发通过对蚁群系统的研究与抽象设计一种智能的群体控制结构,让多个简单的智能控制个体通过学习和进化能够共同完成复杂控制功能。采用集群智能技术进行控制,不追求单个的、庞大的、复杂的体系,而是按控制应用的要求,从功能上划分成多个智能控制个体,各个智能控制个体相互通讯、彼此协调,共同完成大的复杂系统的控制作业任务。该系统不仅具备一般智能控制系统所具有的资源共享、易于扩张、可靠性强、灵活性强、实时性好的特点,而且各智能控制个体通过相互协调、相互协作可解决大规模的复杂问题,克服了建立一个庞大知识库所造成的知识管理和扩展的困难,使系统具有很强的鲁棒性、可靠性和自组织能力。
3.2 集群智能控制系统结构
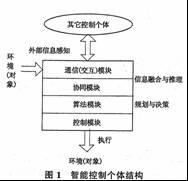
在集群智能控制系统中,基于单个蚂蚁的智能控制个体具备以下属性:自主性、交互性、协同性。所谓自主性是指智能控制个体在没有其他个体介入或外部人工干预的情况下,自主思考和控制自身的状态和行为并能完成一定的任务。交互性是指智能控制个体能从外部环境中获得信息,并能通过自身行动对环境施加影响。这种能力也可以看作是一种通信能力。协同性是指智能控制个体之间能够以一定的方式进行通信和动作之间的协调合作,相互协同来完成复杂的控制任务。智能控制个体结构如图1所示。
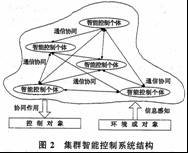
由多个智能控制个体相互协调实现对复杂系统的控制,构成了集群智能控制系统。集群智能控制系统中每个智能控制个体是一个物理的或抽象的实体,能作用于自身和环境,操纵环境的部分表示,并与其它智能控制个体通讯,集群智能控制系统结构如图2所示。
3.3 集群智能控制建模
集群智能控制研究的系统是智能群体控制行为,能够产生鲁棒的群体控制行为的方法就是在队伍层上应用受生物学启发的适应性算法。适应性算法研究的是系统在不了解环境的情况下,如何通过与环境的动态交互获得反馈信息,再利用反馈信息调整自我,以期获得最佳的环境反馈。目前主要的技术线路是群体进化方法,包括遗传算法、进化策略(Evolution Strategies)和进化规则(Evolutionary Programming)。
本文采用的是基于一个最优保留的遗传算法(GA),在智能控制个体上通过选择合适的感知能力、行为选择或者选择能力的方式来进化智能控制个体的一些全局最优的群体行为。
3.3.1 群体行为
令εt为一个智能控制个体群在t时的局部环境或对豪状态,ξ表示智能控制个体的传感信息输人。τ是每个智能控制个体都能完成的控制功能。集群智能控制系统对 的响应是一个协同控制作用U,U由环境产生的约束μ以及集群控制任务的性能标准ν的控制作用组成。以上可以由下式表示:

式中{γt }对应t时目标导向的群体行为,A表示集群智能控制系统,E(A)表示对A的性能评估。
3.3.2 群体行为学习与进化
群体行为学习与进化解决的是由智能控制个体群来执行一项给定任务问题。这需要智能控制个体群从它们与环境或对象的交互中连续地获取经验,并且这些经验是不断更新的,其数学描述如下:

其中ηt表示t时的群体经验,④表示计算更新机制,而εt-1对应在 t-1时感知到的环境或对象状态。
3.3.3 集群智能控制问题描述
给定一群能够感知并改变环境或对象 的智能控制个体构成的集群智能控制系统A,及所希望的控制目标,通过基于最优保留的遗传算法的机制 ,使得A可以在基于一系列ηt变化的基础上逐渐获得协同控制作用U。在执行了U以后,控制目标被A调整到期望值ν。
,使得A可以在基于一系列ηt变化的基础上逐渐获得协同控制作用U。在执行了U以后,控制目标被A调整到期望值ν。
3.3.4 染色体表示
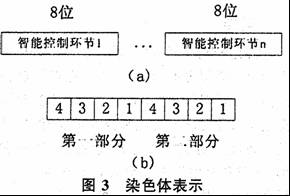
群体中的每个成员都用灰度码编码,称为染色体。因为集群智能控制中智能控制个体的基本功能是完全一致的,所以一般情况下群体中的每个成员的初始染色体定义也是相同的。一般用8位子串来编码一个智能控制个体控制器的各个参数,这8位子串可以分成两个部分每部分4位,分别对应控制器的2位十进制参数;这样做的目的是便于换算,同时智能控制个体控制器的参数个数一般也不会大于两个,也可以根据实际系统的复杂程度和控制参数的情况对染色体的长度、划分和定义进行修改。如图3所示。
3.3.5 适应度函数
为了体现染色体的适应能力,引人了对向题中的每一个染色体都能进行度量的函数,叫适应度函数(Fitness Function)。在遗传算法中用适应度函数来评价染色体的优劣程度,并在此基础上进行各种遗传操作。适应度函数要有效反映每一个染色体与向题最优解染色体之间的差距。因此适应度函数的选择是否适当对算法的性能影响很大,应根据实际问题的特性具体确定。
集群智能控制的适应度函数的确定是建立在对复杂被控对象的控制功能的分解基础上的,一个复杂的控制系统的每一个智能控制个体可以由几类典型且简单的适应度函数来描述,或系统中每一个智能控制个体也可以由一类特定的适应度函数来描述;在实际中以智能控制个体的适应度函数来定义最优的群体控制性能。
若智能控制个体一类或几类适应度函数表示为Si,那么衡量复杂的控制系统最优的群体控制性能的适应度函数可以表示为:

4 仿真研究
倒立摆系统是非线性、强耦合、多变量和自然不稳定的系统。在控制过程中,它能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪等许多控制中的关键问题;是检验各种控制理论的理想模型。单级倒立摆系统(Simple Inverted Pendulum System)是一种广泛应用的物理模型,在对其数学模型进行推导时如果忽略阻力并令所有作用力、位移和角度参数为时间的函数,我们发现小车加速度和摆杆角加速度都是角度θ和水平驱动力F的函数。用它们可以来评价智能个体中染色体的两个参数θ和F的优劣,从而反映出这两个倒立摆的重要参数与理想值之间的差距。现以双智能个体采用集群智能控制的思想和基于最优保留的遗传算方法对单级倒立摆系统对象的小车加速度和摆杆角加速度进行控制。 设小车的质量为M,摆杆的质量为m;摆杆长度为l,在某一瞬间时刻摆角(即摆杆与竖直线的夹角)为θ,作用到小车上的水平驱动力为F。这样,整个倒立摆系统就受到重力、驱动力和摩擦阻力的三个外力的共同作用。驱动力F是由连接小车的传动装置提供,控制倒立摆的稳定实际上就是依靠控制驱动力F使小车在水平面上做与倒立摆运动相关的特定运动。为了简化模型以利于仿真起见,令小车摩擦力和摆杆和小车连接处的摩擦力均为零。
(1)染色体的表示
用12位子串来编码倒立摆的角度和推力,具体的,这12位子串分为两部分,分别对应倒立摆摆杆角度θ与系统受到的外部推力F。12位子串中最重要的6位用来对θ编码,其它6位用来对外力的大小进行编码。
(2)适应度函数
1)系统加速度

2)摆杆角加速度

(3)仿真结果其中:

P为种群大小,Z为最大进化代数,L是染色体长度,PC为交叉概率,PM为变异概率,其它参数为倒立摆系统参数。
(4)仿真数据分析
在仿真中系统加速度的变化在60代之后就可以稳定下来,而摆杆的加速度的变化在80代后也就可以稳定下来,此后潜在运动策略进一步的重组和变异不会引起适应度函数的明显变化,不再对与先前同样的运动变化量敏感。从仿真中可以明显的看到采用集群分布式控制的思想和方法对一级倒立摆控制有比较高的精度和较快的反映能力,与其它控制方法得到的结果基本一致。该方法还可以向二级甚至三级倒立摆控制系统推广。

5 结语
本文针对智能控制中的不足,提出了一种类似蚂蚁群体智能行为的集群智能控制系统,阐述了集群智能控制的思想和体系结构并给出了其数学模型,最后以一级倒立摆系统为对象采用集群控制的思想和方法进行了仿真研究,仿真结果表明集群智能控制对一类复杂系统的控制具有一定的意义。集群智能控制系统在用于多机器人协作与控制和分布性的复杂大系统控制具有广阔的应用前景。目前对于集群智能控制系统需要在“仿生”集群智能控制模型的基础上,进行广义知识模型多层次智能辨识方法研究;研究多信息融合算法和群体协同机制,以达到整体最优控制的多目标决策机制;同时还需研究基于“仿生”模型的系统能控性和能观性问题,给出系统能控性判据和能观性判据。
WWW_PLCJS_COM-PLC-技.术_网
1 引言
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWcW_PLCJS_COM-PLC-技.术_网
智能控制技术是针对被控对象及其环境和任务的复杂多变,不确定性而提出的。现在基于计算机科学、人工智能、信息科学、思维科学、认知科学和人工神经网络等多学科的交叉,已从不同角度奠定了智能控制的理论和技术基础。智能控制的核心是高层控制,其任务在于对实际环境或过程进行决策和规划实现广义问题求解;同时具有用知识表示的非数学的广义模型和数学模型表示的混合控制过程。智能控制正处于发展过程中,还有许多问题有待进一步研究和完善。例如智能控制的模型、算法以及智能控制系统中常常存在不确定性,控制的可靠性和稳定性方面还有待完善。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
目前国内外所研究的智能控制理论方法,一方面是从经典或现代控制理论向智能化发展,另外一方面是从人工智能的角度出发来解决控制问题;无论从哪个方面出发智能控制的模型是单纯的,而方法是单一的;这必然会对复杂系统的控制带来控制性能上的不足。集成融合、取长补短正是复杂系统控制所需要的,这也正是研究集群智能控制的原因所在。
W1WW_P4LCJS_COM-PLC-技.术_网
WWW_PLCJS_COM-PLC-技.术_网
2 生态智能群体行为
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
(1)生态群体行为的意义
WWW_P※LCJS_COM-PLC-)技.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
自仿生学创立以来,人们不断地从生物进化的机理中得到启发,提出许多用于解决复杂优化问题的新方法并成功应用于解决实际问题。众所周知的蚂蚁、蜜蜂与其它完全群居昆虫的群体行为提供了一个显著证明,即由简单智能体构成的系统能够完成现实世界中的复杂任务。从仿生学的角度着,蚁群系统给我们很多启发,对蚁群系统的研究能为研究智能控制系统提供了一个新方法和新方向。
plcjs.技.术_网
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
(2)智能群体行为的特点
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WW.W_PLC※JS_C,OM-PL,C-技.术_网
虽然单个蚂蚁的智能很低,行为简单,但是由这些简单个体所组成的蚁群却表现出较高的智能和极其复杂的行为,能够完成复杂的任务。不仅如此蚁群能够在残酷的大自然中生存卞来,对环境的变化有很高的适应性。任何一个蚂蚁都有独立搬运食物、选择移动的路径以及和其他蚂蚁进行信息交互的能力。如果遇到无法独立完成的事情,可以通过信息的传递通知其他蚂蚁并协同其他蚂蚁完成任务。
WWW_P※LCJS_COM-PLC-)技.术_网
WW.W_PLCJS_COM-PLC-技.术_网
(3)智能群体行为与集群智能控制
WWW_PLCJS@_COM%-PLC-技.术_网
WW.W_PLC※JS_C,OM-PL,C-技.术_网
我们把蚁群系统与智能控制结合起来研究其中有密切关联的问题。蚂蚁与智能控制系统中的智能控制个体很相似,都有一定的智能。通过对蚁群系统的观察,我们可以把蚂蚁抽象为具有一定工作、路由选择、通信和协同能力的智能控制个体。这些智能控制系统中的智能控制个体智能有限,但通过协同工作却可以完成复杂的控制功能。所以我们希望通过研究和抽象蚁群系统中的蚂蚁来研究智能控制系统中的智能控制个体的性能,从而构成一种新型的集群智能控制系统。
WWW_PLC※JS_COM-PmLC-技.术_网
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
3 集群智能控制模型
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WWW_P※LCJS_COM-PLC-)技.术_网
3.1 集群智能控制
WWcW_PLCJS_COM-PLC-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
集群智能控制的目标就是从仿生学的角度出发通过对蚁群系统的研究与抽象设计一种智能的群体控制结构,让多个简单的智能控制个体通过学习和进化能够共同完成复杂控制功能。采用集群智能技术进行控制,不追求单个的、庞大的、复杂的体系,而是按控制应用的要求,从功能上划分成多个智能控制个体,各个智能控制个体相互通讯、彼此协调,共同完成大的复杂系统的控制作业任务。该系统不仅具备一般智能控制系统所具有的资源共享、易于扩张、可靠性强、灵活性强、实时性好的特点,而且各智能控制个体通过相互协调、相互协作可解决大规模的复杂问题,克服了建立一个庞大知识库所造成的知识管理和扩展的困难,使系统具有很强的鲁棒性、可靠性和自组织能力。
WWW_PLCJS_COM-PLC-技.术_网
WWW.PLCJS.COM——可编程控制器技术门户
3.2 集群智能控制系统结构
WWW_P※LCJS_COM-PLC-)技.术_网
plcjs.技.术_网
在集群智能控制系统中,基于单个蚂蚁的智能控制个体具备以下属性:自主性、交互性、协同性。所谓自主性是指智能控制个体在没有其他个体介入或外部人工干预的情况下,自主思考和控制自身的状态和行为并能完成一定的任务。交互性是指智能控制个体能从外部环境中获得信息,并能通过自身行动对环境施加影响。这种能力也可以看作是一种通信能力。协同性是指智能控制个体之间能够以一定的方式进行通信和动作之间的协调合作,相互协同来完成复杂的控制任务。智能控制个体结构如图1所示。
WWW.PLCJS.COM——可编程控制器技术门户
——可——编——程——控-制-器-技——术——门——户
WWW_PLC※JS_COM-PmLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
由多个智能控制个体相互协调实现对复杂系统的控制,构成了集群智能控制系统。集群智能控制系统中每个智能控制个体是一个物理的或抽象的实体,能作用于自身和环境,操纵环境的部分表示,并与其它智能控制个体通讯,集群智能控制系统结构如图2所示。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
plcjs.技.术_网
——可——编——程——控-制-器-技——术——门——户
WWW_PLC※JS_COM-PmLC-技.术_网
3.3 集群智能控制建模
W1WW_P4LCJS_COM-PLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
集群智能控制研究的系统是智能群体控制行为,能够产生鲁棒的群体控制行为的方法就是在队伍层上应用受生物学启发的适应性算法。适应性算法研究的是系统在不了解环境的情况下,如何通过与环境的动态交互获得反馈信息,再利用反馈信息调整自我,以期获得最佳的环境反馈。目前主要的技术线路是群体进化方法,包括遗传算法、进化策略(Evolution Strategies)和进化规则(Evolutionary Programming)。
P.L.C.技.术.网——可编程控制器技术门户
WW.W_PLC※JS_C,OM-PL,C-技.术_网
本文采用的是基于一个最优保留的遗传算法(GA),在智能控制个体上通过选择合适的感知能力、行为选择或者选择能力的方式来进化智能控制个体的一些全局最优的群体行为。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
3.3.1 群体行为
WWW_PL※CJS_COM-PLC-技.术_网
WW.W_PLC※JS_C,OM-PL,C-技.术_网
令εt为一个智能控制个体群在t时的局部环境或对豪状态,ξ表示智能控制个体的传感信息输人。τ是每个智能控制个体都能完成的控制功能。集群智能控制系统对 的响应是一个协同控制作用U,U由环境产生的约束μ以及集群控制任务的性能标准ν的控制作用组成。以上可以由下式表示:
plcjs.技.术_网
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
式中{γt }对应t时目标导向的群体行为,A表示集群智能控制系统,E(A)表示对A的性能评估。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
3.3.2 群体行为学习与进化
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
W1WW_P4LCJS_COM-PLC-技.术_网
群体行为学习与进化解决的是由智能控制个体群来执行一项给定任务问题。这需要智能控制个体群从它们与环境或对象的交互中连续地获取经验,并且这些经验是不断更新的,其数学描述如下:
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WW.W_PLCJS_COM-PLC-技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
其中ηt表示t时的群体经验,④表示计算更新机制,而εt-1对应在 t-1时感知到的环境或对象状态。
WWW_P※LCJS_CO※M-PLC-技-.术_网
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
3.3.3 集群智能控制问题描述
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW_PLCJS_COM-PLC-技.术_网
给定一群能够感知并改变环境或对象 的智能控制个体构成的集群智能控制系统A,及所希望的控制目标,通过基于最优保留的遗传算法的机制
,使得A可以在基于一系列ηt变化的基础上逐渐获得协同控制作用U。在执行了U以后,控制目标被A调整到期望值ν。WW.W_PLCJS_COM-PLC-技.术_网
WWW_PLCJS@_COM%-PLC-技.术_网
3.3.4 染色体表示
WWW_PL※CJS_COM-PLC-技.术_网
plcjs.技.术_网
群体中的每个成员都用灰度码编码,称为染色体。因为集群智能控制中智能控制个体的基本功能是完全一致的,所以一般情况下群体中的每个成员的初始染色体定义也是相同的。一般用8位子串来编码一个智能控制个体控制器的各个参数,这8位子串可以分成两个部分每部分4位,分别对应控制器的2位十进制参数;这样做的目的是便于换算,同时智能控制个体控制器的参数个数一般也不会大于两个,也可以根据实际系统的复杂程度和控制参数的情况对染色体的长度、划分和定义进行修改。如图3所示。
WWW_PLCJS_COM-PLC-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
——可——编——程——控-制-器-技——术——门——户
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
3.3.5 适应度函数
WWW_P※LCJS_CO※M-PLC-技-.术_网
plcjs.技.术_网
为了体现染色体的适应能力,引人了对向题中的每一个染色体都能进行度量的函数,叫适应度函数(Fitness Function)。在遗传算法中用适应度函数来评价染色体的优劣程度,并在此基础上进行各种遗传操作。适应度函数要有效反映每一个染色体与向题最优解染色体之间的差距。因此适应度函数的选择是否适当对算法的性能影响很大,应根据实际问题的特性具体确定。
WW.W_PLCJS_COM-PLC-技.术_网
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
集群智能控制的适应度函数的确定是建立在对复杂被控对象的控制功能的分解基础上的,一个复杂的控制系统的每一个智能控制个体可以由几类典型且简单的适应度函数来描述,或系统中每一个智能控制个体也可以由一类特定的适应度函数来描述;在实际中以智能控制个体的适应度函数来定义最优的群体控制性能。
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
若智能控制个体一类或几类适应度函数表示为Si,那么衡量复杂的控制系统最优的群体控制性能的适应度函数可以表示为:
WWcW_PLCJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW_PL※CJS_COM-PLC-技.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
4 仿真研究
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW_PLCJS@_COM%-PLC-技.术_网
倒立摆系统是非线性、强耦合、多变量和自然不稳定的系统。在控制过程中,它能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪等许多控制中的关键问题;是检验各种控制理论的理想模型。单级倒立摆系统(Simple Inverted Pendulum System)是一种广泛应用的物理模型,在对其数学模型进行推导时如果忽略阻力并令所有作用力、位移和角度参数为时间的函数,我们发现小车加速度和摆杆角加速度都是角度θ和水平驱动力F的函数。用它们可以来评价智能个体中染色体的两个参数θ和F的优劣,从而反映出这两个倒立摆的重要参数与理想值之间的差距。现以双智能个体采用集群智能控制的思想和基于最优保留的遗传算方法对单级倒立摆系统对象的小车加速度和摆杆角加速度进行控制。 设小车的质量为M,摆杆的质量为m;摆杆长度为l,在某一瞬间时刻摆角(即摆杆与竖直线的夹角)为θ,作用到小车上的水平驱动力为F。这样,整个倒立摆系统就受到重力、驱动力和摩擦阻力的三个外力的共同作用。驱动力F是由连接小车的传动装置提供,控制倒立摆的稳定实际上就是依靠控制驱动力F使小车在水平面上做与倒立摆运动相关的特定运动。为了简化模型以利于仿真起见,令小车摩擦力和摆杆和小车连接处的摩擦力均为零。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW_P※LCJS_COM-PLC-)技.术_网
(1)染色体的表示
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW.PLCJS.COM——可编程控制器技术门户
用12位子串来编码倒立摆的角度和推力,具体的,这12位子串分为两部分,分别对应倒立摆摆杆角度θ与系统受到的外部推力F。12位子串中最重要的6位用来对θ编码,其它6位用来对外力的大小进行编码。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
(2)适应度函数
WWW_P※LCJS_CO※M-PLC-技-.术_网
——可——编——程——控-制-器-技——术——门——户
1)系统加速度
plcjs.技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW_PL※CJS_COM-PLC-技.术_网
2)摆杆角加速度
WW.W_PLCJS_COM-PLC-技.术_网
WWW.PLCJS.COM——可编程控制器技术门户
WWW_PL※CJS_COM-PLC-技.术_网
WWW_PLCJS_COM-PLC-技.术_网
(3)仿真结果其中:
P.L.C.技.术.网——可编程控制器技术门户
WWcW_PLCJS_COM-PLC-技.术_网

WWW.PLCJS.COM——可编程控制器技术门户
WWW_PL※CJS_COM-PLC-技.术_网
P为种群大小,Z为最大进化代数,L是染色体长度,PC为交叉概率,PM为变异概率,其它参数为倒立摆系统参数。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PLCJS_COM-PLC-技.术_网
(4)仿真数据分析
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
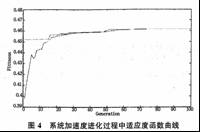
在仿真中系统加速度的变化在60代之后就可以稳定下来,而摆杆的加速度的变化在80代后也就可以稳定下来,此后潜在运动策略进一步的重组和变异不会引起适应度函数的明显变化,不再对与先前同样的运动变化量敏感。从仿真中可以明显的看到采用集群分布式控制的思想和方法对一级倒立摆控制有比较高的精度和较快的反映能力,与其它控制方法得到的结果基本一致。该方法还可以向二级甚至三级倒立摆控制系统推广。
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW_PLC※JS_COM-PmLC-技.术_网
WWcW_PLCJS_COM-PLC-技.术_网
WWW_P※LCJS_COM-PLC-)技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
P.L.C.技.术.网——可编程控制器技术门户
5 结语
WWW.PLCJS.COM——可编程控制器技术门户
本文针对智能控制中的不足,提出了一种类似蚂蚁群体智能行为的集群智能控制系统,阐述了集群智能控制的思想和体系结构并给出了其数学模型,最后以一级倒立摆系统为对象采用集群控制的思想和方法进行了仿真研究,仿真结果表明集群智能控制对一类复杂系统的控制具有一定的意义。集群智能控制系统在用于多机器人协作与控制和分布性的复杂大系统控制具有广阔的应用前景。目前对于集群智能控制系统需要在“仿生”集群智能控制模型的基础上,进行广义知识模型多层次智能辨识方法研究;研究多信息融合算法和群体协同机制,以达到整体最优控制的多目标决策机制;同时还需研究基于“仿生”模型的系统能控性和能观性问题,给出系统能控性判据和能观性判据。
本新闻共2页,当前在第1页1 2
WWW.PLCJS.COM——可编程控制器技术门户
上一篇: 航向姿态系统自动测试设备研制下一篇: 没有了
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行