PLC精品课程:5.PLC的编程语言和基本指令
日期:2008-8-31 22:08:28 来源:本站整理
点击: 作者:
点击: 作者:
第13篇:PLC精品课程:13.PLC功能指令
点击【 大 中 小 】放大字体.
一、可编程控制器的编程语言
不同厂家,不同型号的PLC的编程语言只能适应自己的产品。IEC中的PLC编程语言标准中有五种编程语言:顺序功能图编程语言、梯形图编程语言、功能块图编程语言、指令语句表编程语言、结构文本编程语言。 最常用的就是梯形图编程语言和指令语句表编程语言。
1、梯形图编程语言
梯形图是在原继电器—接触器控制系统的继电器梯形图基础上演变而来的一种图形语言。它是目前用得最多的PLC编程语言。
注意:梯形图表示的并不是一个实际电路而只是一个控制程序,其间的连线表示的是它们之间的逻辑关系,即所谓“软接线”。
常开触点 :
常闭触点:
线圈:
注意:它们并非是物理实体,而是“软继电器”。每个“软继电器”仅对应PLC存储单元中的一位。该位状态为“1”时,对应的继电器线圈接通,其常开触点闭合、常闭触点断开;状态为“0”时,对应的继电器线圈不通,其常开、常闭触点保持原态。
2、梯形图编程格式
(1)梯形图按行从上至下编写,每一行从左往右顺序编写。PLC程序执行顺序与梯形图的编写顺序一致。
(2)图左、右边垂直线称为起始母线、终止母线。每一逻辑行必须从起始母线开始画起,终止于继电器线圈或终止母线(有些PLC终止母线可以省略)。
(3)梯形图的起始母线与线圈之间一定要有触点,而线圈与终止母线之间则不能有任何触点。
3、指令语句表编程语言
助记符语言类似于计算机汇编语言,用一些简洁易记的文字符号表达PLC的各种指令。同一厂家的PLC产品,其助记符语言与梯形图语言是相互对应的,可互相转换。
助记符语言常用于手持编程器中,梯形图语言则多用于计算机编程环境中。
案例
在生产实践过程中,某些生产机械常要求既能正常起动,又能实现调整位置的点动工作。 试用可编程控制器的基本逻辑指令来控制电动机的点动及连续运行。
1、异步电动机控制线路图
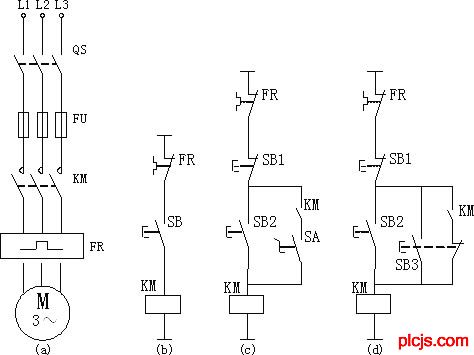
图(a)为主电路。工作时,合上刀开关 QS ,三相交流电经过 QS ,熔断起 FU ,接触器 KM 主触点,热继电器 FR 至三相交流电动机。
图(b)为最简单的点动控制线路。起动按钮 SB 没有并联接触器 KM 的自锁触点,按下 SB , KM 线圈通电,松开按钮 SB 时,接触器 KM 线圈又失电,其主触点断开,电动机停止运转。
图(c)是带手动开关 SA 的点动控制线路。当需要点动控制时,只要把开关 SA 断开,由按钮 SB 2 来进行点动控制。当需要正常运行时,只要把开关 SA 合上,将 KM 的自锁触点接入,即可实现连续控制。
图(d)中增加了一个复合按钮 SB 3 来实现点动控制。需要点动运行时,按下 SB 3 点动按钮,其常闭触点先断开自锁电路,常开触发后闭合接通起动控制电路, KM 接触器线圈得电,主触点闭合,接通三相电源,电动机起动运转。当松开点动按钮 SB 3 时, KM 线圈失电, KM 主触点断开,电动机停止运转。
若需要电动机连续运转,由停止按钮 SB 1 及起动按钮 SB 2 控制,接触器 KM 的辅助触点起自锁作用。
2、可编程控制器的硬件连接
实现电动机的点动及连续运行所需的器件有:起点按钮 SB1 ,停止按钮 SB2 ,交流接触器 KM ,热继电器 JR 及刀开关QS 等。主电路的连接如图所示。

3、梯形图的设计
梯形图便是是以图形符号及图形符号在图中的相互关系表示控制关系的编程语言,是从继电器电路图演变而来。两者部分符号对应关系如表所示。

根据输入输出接线圈可设计出异步电动机点动运行的梯形图如图 (a)所示。工作过程分析如下:当按下 SB1时,输入继电器X0得电,其常开触点闭合,因为异步电动机未过热,热继电器常开触点不闭合,输入继电器 X2 不接通,其常闭触点保持闭合,则此时输出继电器 Y0 接通,进而接触器 KM 得电,其主触点接通电动机的电源,则电动机起动运行。当松开按钮 SB1 时, X0 失电,其触点断开, Y0 失电,接触点 KM 断电,电动机停止转动,即本梯形图可实现点动控制功能。大家可能发现,在梯形图中使用的热继电器的触点为常开触点,如果要使用常闭触点,梯形图应如何设计?

图(b)为电动机连续运行的梯形图,其工作过程分析如下:当按 SB1被按下时X0接通,Y0置1,这时电动机连续运行。需要停车时,按下停车按钮SB2,串联于Y0线圈回路中的X1的常闭触点断开,Y0置1,电机失电停车。
起--保--停电路
梯形图(b)称为启-保-停电路。这个名称主要来源于图中的自保持触点 Y0 。并联在 X0 常开触点上的 Y0 常开触点的作用是当钮 SB 1 松开,输入继电器 X0 断开时,线圈 Y0 仍然能保持接通状态。工程中把这个触点叫做“自保持触点“。启-保-停电路是梯形图中最典型的单元,它包含了梯形图程序的全部要素。它们是:
a 、事件 每一个梯形图支路都针对一个事件。事件输出线圈(或功能框)表示,本例中为 Y0 。
b 、事件发生的条件 梯形图支路中除了线圈外还有触点的组合,使线圈置 1 的条件既是事件发生的条件,本例中为起动按钮 X0 置 1。
c 、事件得以延续的条件 触点组合中使线圈置 1 得以持久的条件。本例中为与 X0 并联的 Y0 的自保持触点。
d 、使事件终止的条件 触点组合中使线圈置 1 中断的条件。本例中为 X1 的常闭触点断开。
4、语句表
点动控制即图(a)所使用到的基本指令有:从母线取用常开触点指令 LD ;常闭触点的串联指令 ANI ;输出继电器的线圈驱动指令 OUT 。而每条指令占用一个程序步,语句表如下

连续运行控制即图(b)所使用到的基本指令有:从母线取用常开触点指令 LD ;常开触点的并联指令 OR ;常闭触点的串联指令 ANI ;输出继电器的线圈驱动指令 OUT 。语句表如下:
——可——编——程——控-制-器-技——术——门——户
一、可编程控制器的编程语言
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
不同厂家,不同型号的PLC的编程语言只能适应自己的产品。IEC中的PLC编程语言标准中有五种编程语言:顺序功能图编程语言、梯形图编程语言、功能块图编程语言、指令语句表编程语言、结构文本编程语言。 最常用的就是梯形图编程语言和指令语句表编程语言。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
1、梯形图编程语言
WW.W_PLCJS_COM-PLC-技.术_网
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
梯形图是在原继电器—接触器控制系统的继电器梯形图基础上演变而来的一种图形语言。它是目前用得最多的PLC编程语言。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
注意:梯形图表示的并不是一个实际电路而只是一个控制程序,其间的连线表示的是它们之间的逻辑关系,即所谓“软接线”。
——可——编——程——控-制-器-技——术——门——户
常开触点 :
WWW_PLC※JS_COM-PmLC-技.术_网
常闭触点:
P.L.C.技.术.网——可编程控制器技术门户
线圈:
P.L.C.技.术.网——可编程控制器技术门户
注意:它们并非是物理实体,而是“软继电器”。每个“软继电器”仅对应PLC存储单元中的一位。该位状态为“1”时,对应的继电器线圈接通,其常开触点闭合、常闭触点断开;状态为“0”时,对应的继电器线圈不通,其常开、常闭触点保持原态。
WWW_PLCJS_COM-PLC-技.术_网
2、梯形图编程格式
W1WW_P4LCJS_COM-PLC-技.术_网
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
(1)梯形图按行从上至下编写,每一行从左往右顺序编写。PLC程序执行顺序与梯形图的编写顺序一致。
WWcW_PLCJS_COM-PLC-技.术_网
(2)图左、右边垂直线称为起始母线、终止母线。每一逻辑行必须从起始母线开始画起,终止于继电器线圈或终止母线(有些PLC终止母线可以省略)。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
(3)梯形图的起始母线与线圈之间一定要有触点,而线圈与终止母线之间则不能有任何触点。
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
3、指令语句表编程语言
WWW_P※LCJS_COM-PLC-)技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
助记符语言类似于计算机汇编语言,用一些简洁易记的文字符号表达PLC的各种指令。同一厂家的PLC产品,其助记符语言与梯形图语言是相互对应的,可互相转换。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
助记符语言常用于手持编程器中,梯形图语言则多用于计算机编程环境中。
WWW_PLCJS_COM-PLC-技.术_网
案例
WW.W_PLCJS_COM-PLC-技.术_网
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
在生产实践过程中,某些生产机械常要求既能正常起动,又能实现调整位置的点动工作。 试用可编程控制器的基本逻辑指令来控制电动机的点动及连续运行。
P.L.C.技.术.网——可编程控制器技术门户
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
1、异步电动机控制线路图
WWW.PLCJS.COM——可编程控制器技术门户
——可——编——程——控-制-器-技——术——门——户
WWW_P※LCJS_COM-PLC-)技.术_网
P.L.C.技.术.网——可编程控制器技术门户
图(a)为主电路。工作时,合上刀开关 QS ,三相交流电经过 QS ,熔断起 FU ,接触器 KM 主触点,热继电器 FR 至三相交流电动机。
W1WW_P4LCJS_COM-PLC-技.术_网
图(b)为最简单的点动控制线路。起动按钮 SB 没有并联接触器 KM 的自锁触点,按下 SB , KM 线圈通电,松开按钮 SB 时,接触器 KM 线圈又失电,其主触点断开,电动机停止运转。
WWW_P※LCJS_COM-PLC-)技.术_网
图(c)是带手动开关 SA 的点动控制线路。当需要点动控制时,只要把开关 SA 断开,由按钮 SB 2 来进行点动控制。当需要正常运行时,只要把开关 SA 合上,将 KM 的自锁触点接入,即可实现连续控制。
WWW_PLCJS@_COM%-PLC-技.术_网
图(d)中增加了一个复合按钮 SB 3 来实现点动控制。需要点动运行时,按下 SB 3 点动按钮,其常闭触点先断开自锁电路,常开触发后闭合接通起动控制电路, KM 接触器线圈得电,主触点闭合,接通三相电源,电动机起动运转。当松开点动按钮 SB 3 时, KM 线圈失电, KM 主触点断开,电动机停止运转。
WWW_PLCJS_COM-PLC-技.术_网
若需要电动机连续运转,由停止按钮 SB 1 及起动按钮 SB 2 控制,接触器 KM 的辅助触点起自锁作用。
WWW_P※LCJS_CO※M-PLC-技-.术_网
2、可编程控制器的硬件连接
plcjs.技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
实现电动机的点动及连续运行所需的器件有:起点按钮 SB1 ,停止按钮 SB2 ,交流接触器 KM ,热继电器 JR 及刀开关QS 等。主电路的连接如图所示。
WWW_PLCJS@_COM%-PLC-技.术_网
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW_P※LCJS_CO※M-PLC-技-.术_网
3、梯形图的设计
WWW_PL※CJS_COM-PLC-技.术_网
梯形图便是是以图形符号及图形符号在图中的相互关系表示控制关系的编程语言,是从继电器电路图演变而来。两者部分符号对应关系如表所示。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
根据输入输出接线圈可设计出异步电动机点动运行的梯形图如图 (a)所示。工作过程分析如下:当按下 SB1时,输入继电器X0得电,其常开触点闭合,因为异步电动机未过热,热继电器常开触点不闭合,输入继电器 X2 不接通,其常闭触点保持闭合,则此时输出继电器 Y0 接通,进而接触器 KM 得电,其主触点接通电动机的电源,则电动机起动运行。当松开按钮 SB1 时, X0 失电,其触点断开, Y0 失电,接触点 KM 断电,电动机停止转动,即本梯形图可实现点动控制功能。大家可能发现,在梯形图中使用的热继电器的触点为常开触点,如果要使用常闭触点,梯形图应如何设计?
WWW_PL※CJS_COM-PLC-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
图(b)为电动机连续运行的梯形图,其工作过程分析如下:当按 SB1被按下时X0接通,Y0置1,这时电动机连续运行。需要停车时,按下停车按钮SB2,串联于Y0线圈回路中的X1的常闭触点断开,Y0置1,电机失电停车。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
起--保--停电路
W1WW_P4LCJS_COM-PLC-技.术_网
梯形图(b)称为启-保-停电路。这个名称主要来源于图中的自保持触点 Y0 。并联在 X0 常开触点上的 Y0 常开触点的作用是当钮 SB 1 松开,输入继电器 X0 断开时,线圈 Y0 仍然能保持接通状态。工程中把这个触点叫做“自保持触点“。启-保-停电路是梯形图中最典型的单元,它包含了梯形图程序的全部要素。它们是:
plcjs.技.术_网
a 、事件 每一个梯形图支路都针对一个事件。事件输出线圈(或功能框)表示,本例中为 Y0 。
WW.W_PLCJS_COM-PLC-技.术_网
b 、事件发生的条件 梯形图支路中除了线圈外还有触点的组合,使线圈置 1 的条件既是事件发生的条件,本例中为起动按钮 X0 置 1。
WW.W_PLC※JS_C,OM-PL,C-技.术_网
c 、事件得以延续的条件 触点组合中使线圈置 1 得以持久的条件。本例中为与 X0 并联的 Y0 的自保持触点。
WW.W_PLCJS_COM-PLC-技.术_网
d 、使事件终止的条件 触点组合中使线圈置 1 中断的条件。本例中为 X1 的常闭触点断开。
WWW_PLC※JS_COM-PmLC-技.术_网
4、语句表
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
点动控制即图(a)所使用到的基本指令有:从母线取用常开触点指令 LD ;常闭触点的串联指令 ANI ;输出继电器的线圈驱动指令 OUT 。而每条指令占用一个程序步,语句表如下
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
连续运行控制即图(b)所使用到的基本指令有:从母线取用常开触点指令 LD ;常开触点的并联指令 OR ;常闭触点的串联指令 ANI ;输出继电器的线圈驱动指令 OUT 。语句表如下:
本新闻共2页,当前在第1页1 2
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
上一篇: PLC精品课程:4.PLC的编程元件下一篇: PLC精品课程:6.PLC的基本指令
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行