运动控制系列芯片HCTL-1100的原理及应用
日期:2009-4-29 23:06:00 来源:本站整理
点击: 作者:loveplc
点击: 作者:loveplc
点击【 大 中 小 】放大字体.
摘要:HCTL-1100是美国Agilent公司生产的高性能通用运动控制系列芯片。利用它可以与主处理器、放大器、电机和增量式编码器构成一个完整的运动控制系统。因此HCTL-1100可广泛应用于打印机、医疗器械、原材料加工和各种自动化控制领域。文中介绍了HCTL-1100芯片的结构、原理及应用。
关键词:HCTL-1100 运动控制 单片机 电机 增量式编码器
1、HCTL-1100的特性
HCTL-1100是美国Agilent公司生产的高性能通用运动控制系列芯片,它内部集成了数字滤波器、换向器等可编程器件,因而可以使系统使用最少的元件来实现运行控制,这样不仅减轻了上位主机的控制负担,同时还具有很大的灵活性。HCTL-1100的主要特点如下:
●功耗低;
●具有PDIP和PLCC两种封装形式;
●可用来控制直流有刷、直流无刷和步进电机;
●内含可编程数字滤波器和换向器;
●具有8位并行和PWM(脉宽调制)电机额定值输出端口;
●与TTL电平兼容;
●带有协调多个HCTL-1100的SYNC(同步)引脚;
●具有100kHz~2MHz的工作频率范围;
●带有编码器输入端口。
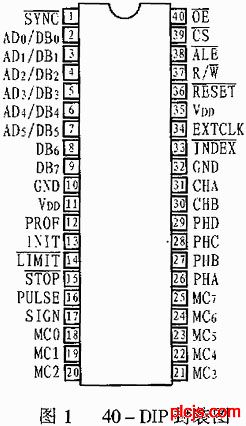
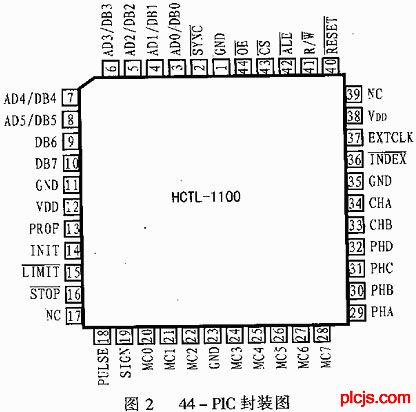
2、TCTL-1100的引脚功能
TCTL-1100具有40-PDIP和44-PLCC两种封装形式:图1和图2分别为这两种封装形式的脚排列图。
HCTL-1100运动控制芯片各主要引脚的功能说明如下:
●同步引脚(SYNC)
该引脚只在INIT/IDLE模式下有效。可用来同步两个或多个芯片。将多个芯片的SYNC端连在一起来接收上位机的命令可实现同步控制。
●限位引脚(LIMIT)
用于输入紧急限位标志,低电平有效。当该脚有效时,器件将进入INIT/IDLE模式,清除电机额定值并切断电机电源,同时清除三个控制模式标志。当由INIT/IDLE模式重新进入控制模式后,这些标志可自动恢复原值。不用时应将该脚连到VDD,否则会引起触发而使系统进入错误的紧急状态。
●停止引脚(STOP)
该停止标志仅适用于积分速率模式,低电平有效。有效时,系统将会减速直到停止,同时将保持零速度状态直到该位变高和新的速度命令被接收为止。不用时也应将该端连到VDD。
●编码器输入引脚(CHA,CHB,INDEX)
这三个引脚可用于接收增量式编码器的TTL,电平输出。共中通道A和B所接收的信号将被编码成24位位置计数器信号并从换向器输出。
●电机额定值端口(MC0-MC7)
八位电机额定值端口由寄存器R08H组成,该寄存器的数据将直接传到外部引脚MC0-MC7。其中MC7是最高有效位,R08H可读可写,写入时通常为INIT/IDLE状态。
●脉宽调制(PWM)输出端口(PLUSE,SIGN)
PWM端口由PULSE和SIGN引脚组成。该端口输出的电机额定值为带有正负极性的脉宽调制信号。
●梯度式引脚(PROF)
该引脚与内部状态寄存器的软件标志位4位连,也可由标志寄存器(R00H)的位0表示。当引脚和标志位为高时,表明系统正处于梯度式移动状态。移动结束后,控制器将对该标志位清零。应当注意:标志位清零的那一刻并不表明电机已停止工作。因此,它只是命令描述的完成而不是实际操作的完成。如果电机在移动中发生延迟而能跟上命令所要求的物理移动,则标志位将在移动完成前被清零。
●初始化/空闲引脚(INIT)
该引脚的状态用于表明HCTL-1100正处于初始化/空闲状态,它应与内部状态寄存器的位5相连,也可由标志寄存器(R00H)的位1表示。
●换向器引脚(PHA~PHD)
这些引脚用于驱动无刷或步进电机。使用时可以对这四个引脚进行编程,以用于驱动多相电机的每个线圈。
3、工作原理
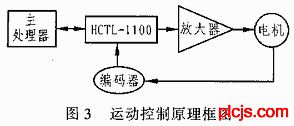
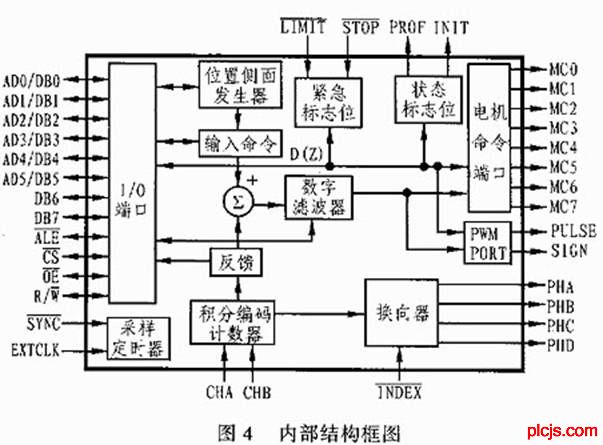
HCTL-1100可通过8位双向地址数据复用端口与主机相连,以接收运动控制命令并控制电机带动目标系统运动,同时从增量式编码器的积分输出端接收位置(或速度)反馈信息。将该信息与预置的额定值进行比较,并将矫正后的值输出给控制电机便可以带动目标系统的运动。图3为其运动控制原理框图,图4所示为HCTL-1100的内部结构框图。
4、HCTL-1100的寄存器
HCTL-1100的工作过程由内部的64个八位寄存器控制。其中35个寄存器用于进行初始化或命令字的写入等操作。剩余的29个作为临时寄存器,但这些寄存器不能直接使用。可用的35个寄存器可分为一般控制、输出、滤波器和换向器四类。一般控制寄存器又包括标志寄存器(R00H)、可编程计数器(R05H)、状态寄存器(R07H)、采样定时寄存器(R0FH)、读实际位置和预置实际位置寄存器等。而输出寄存器(包括禁止极性转换,8位电机额定值和脉宽调制额定值输出)则包括电机额定值寄存器(R08H)和脉宽调制额定值寄存器(R09H)两种。
5、工作流程
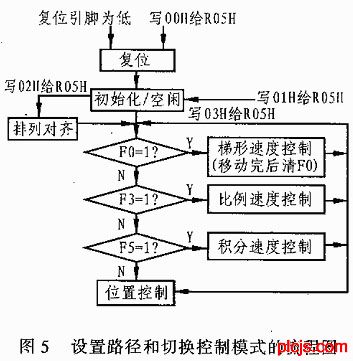
HCTL-1100有三种设置路径和四种控制模式可供用户选择。三种路径包括复位、初始化/空岁和排列对齐。四种控制模式分别为:位置控制、比例速率控制、梯形速度控制和积分速度控制。
图5给出了如何用命令来设置路径和切换控制模式的流程图。
6、具体应用
用HCTL-1100与主机(以8051为例)接口时,可通过8051的I/O端口P1.0~P2.3来控制HCTL-1100的读/写、输出使能、片选、地址锁存和复位等控制引脚。其部分软件程序如下:
RD1100:SETB P2.0 ;设置读/写状态为读
MOV P,1B ;锁存地址
CLR P2.3 ;锁存地址
CLR P2.3 ;发地址锁存信号脉冲
SETB P2.3
MOV P1,#0FFH
CLR P2.2 ;发片选信号脉冲
SETB P2.2
NOP
NOP
NOP ;延时4μs,为1MHz的HCTL-1100提供足够的时间
CLR P2.1 ;设置输出势能引脚为效
MOV A,P0 ;从1100获取数据
SETB P2.1 ;使输出势能无效
RET
WWW_PLCJS_COM-PLC-技.术_网
摘要:HCTL-1100是美国Agilent公司生产的高性能通用运动控制系列芯片。利用它可以与主处理器、放大器、电机和增量式编码器构成一个完整的运动控制系统。因此HCTL-1100可广泛应用于打印机、医疗器械、原材料加工和各种自动化控制领域。文中介绍了HCTL-1100芯片的结构、原理及应用。
W1WW_P4LCJS_COM-PLC-技.术_网
关键词:HCTL-1100 运动控制 单片机 电机 增量式编码器
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
1、HCTL-1100的特性
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
HCTL-1100是美国Agilent公司生产的高性能通用运动控制系列芯片,它内部集成了数字滤波器、换向器等可编程器件,因而可以使系统使用最少的元件来实现运行控制,这样不仅减轻了上位主机的控制负担,同时还具有很大的灵活性。HCTL-1100的主要特点如下:
WWW_PLCJS@_COM%-PLC-技.术_网
●功耗低;
WWW_P※LCJS_CO※M-PLC-技-.术_网
●具有PDIP和PLCC两种封装形式;
P.L.C.技.术.网——可编程控制器技术门户
●可用来控制直流有刷、直流无刷和步进电机;
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
●内含可编程数字滤波器和换向器;
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
●具有8位并行和PWM(脉宽调制)电机额定值输出端口;
WWW_PL※CJS_COM-PLC-技.术_网
●与TTL电平兼容;
——可——编——程——控-制-器-技——术——门——户
●带有协调多个HCTL-1100的SYNC(同步)引脚;
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
●具有100kHz~2MHz的工作频率范围;
plcjs.技.术_网
●带有编码器输入端口。
WWW_PLC※JS_COM-PmLC-技.术_网
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WW.W_PLCJS_COM-PLC-技.术_网
2、TCTL-1100的引脚功能
WWW_P※LCJS_COM-PLC-)技.术_网
TCTL-1100具有40-PDIP和44-PLCC两种封装形式:图1和图2分别为这两种封装形式的脚排列图。
WWW_PLC※JS_COM-PmLC-技.术_网
HCTL-1100运动控制芯片各主要引脚的功能说明如下:
WWW_PL※CJS_COM-PLC-技.术_网
●同步引脚(SYNC)
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
该引脚只在INIT/IDLE模式下有效。可用来同步两个或多个芯片。将多个芯片的SYNC端连在一起来接收上位机的命令可实现同步控制。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
●限位引脚(LIMIT)
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
用于输入紧急限位标志,低电平有效。当该脚有效时,器件将进入INIT/IDLE模式,清除电机额定值并切断电机电源,同时清除三个控制模式标志。当由INIT/IDLE模式重新进入控制模式后,这些标志可自动恢复原值。不用时应将该脚连到VDD,否则会引起触发而使系统进入错误的紧急状态。
W1WW_P4LCJS_COM-PLC-技.术_网
●停止引脚(STOP)
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_P※LCJS_CO※M-PLC-技-.术_网
该停止标志仅适用于积分速率模式,低电平有效。有效时,系统将会减速直到停止,同时将保持零速度状态直到该位变高和新的速度命令被接收为止。不用时也应将该端连到VDD。
WW.W_PLCJS_COM-PLC-技.术_网
●编码器输入引脚(CHA,CHB,INDEX)
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
这三个引脚可用于接收增量式编码器的TTL,电平输出。共中通道A和B所接收的信号将被编码成24位位置计数器信号并从换向器输出。
——可——编——程——控-制-器-技——术——门——户
●电机额定值端口(MC0-MC7)
WW.W_PLCJS_COM-PLC-技.术_网
八位电机额定值端口由寄存器R08H组成,该寄存器的数据将直接传到外部引脚MC0-MC7。其中MC7是最高有效位,R08H可读可写,写入时通常为INIT/IDLE状态。
WWW.PLCJS.COM——可编程控制器技术门户
●脉宽调制(PWM)输出端口(PLUSE,SIGN)
WWW_PL※CJS_COM-PLC-技.术_网
PWM端口由PULSE和SIGN引脚组成。该端口输出的电机额定值为带有正负极性的脉宽调制信号。
WWcW_PLCJS_COM-PLC-技.术_网
●梯度式引脚(PROF)
WWW_PLCJS_COM-PLC-技.术_网
该引脚与内部状态寄存器的软件标志位4位连,也可由标志寄存器(R00H)的位0表示。当引脚和标志位为高时,表明系统正处于梯度式移动状态。移动结束后,控制器将对该标志位清零。应当注意:标志位清零的那一刻并不表明电机已停止工作。因此,它只是命令描述的完成而不是实际操作的完成。如果电机在移动中发生延迟而能跟上命令所要求的物理移动,则标志位将在移动完成前被清零。
——可——编——程——控-制-器-技——术——门——户
WWW.PLCJS.COM——可编程控制器技术门户
WWW_PL※CJS_COM-PLC-技.术_网
●初始化/空闲引脚(INIT)
WWW_PLCJS@_COM%-PLC-技.术_网
该引脚的状态用于表明HCTL-1100正处于初始化/空闲状态,它应与内部状态寄存器的位5相连,也可由标志寄存器(R00H)的位1表示。
WWcW_PLCJS_COM-PLC-技.术_网
●换向器引脚(PHA~PHD)
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
这些引脚用于驱动无刷或步进电机。使用时可以对这四个引脚进行编程,以用于驱动多相电机的每个线圈。
WWW_PLC※JS_COM-PmLC-技.术_网
3、工作原理
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
HCTL-1100可通过8位双向地址数据复用端口与主机相连,以接收运动控制命令并控制电机带动目标系统运动,同时从增量式编码器的积分输出端接收位置(或速度)反馈信息。将该信息与预置的额定值进行比较,并将矫正后的值输出给控制电机便可以带动目标系统的运动。图3为其运动控制原理框图,图4所示为HCTL-1100的内部结构框图。
plcjs.技.术_网
4、HCTL-1100的寄存器
WWcW_PLCJS_COM-PLC-技.术_网
HCTL-1100的工作过程由内部的64个八位寄存器控制。其中35个寄存器用于进行初始化或命令字的写入等操作。剩余的29个作为临时寄存器,但这些寄存器不能直接使用。可用的35个寄存器可分为一般控制、输出、滤波器和换向器四类。一般控制寄存器又包括标志寄存器(R00H)、可编程计数器(R05H)、状态寄存器(R07H)、采样定时寄存器(R0FH)、读实际位置和预置实际位置寄存器等。而输出寄存器(包括禁止极性转换,8位电机额定值和脉宽调制额定值输出)则包括电机额定值寄存器(R08H)和脉宽调制额定值寄存器(R09H)两种。
WWW_PLC※JS_COM-PmLC-技.术_网
5、工作流程
——可——编——程——控-制-器-技——术——门——户
HCTL-1100有三种设置路径和四种控制模式可供用户选择。三种路径包括复位、初始化/空岁和排列对齐。四种控制模式分别为:位置控制、比例速率控制、梯形速度控制和积分速度控制。
WWW_PLCJS_COM-PLC-技.术_网
图5给出了如何用命令来设置路径和切换控制模式的流程图。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
6、具体应用
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
用HCTL-1100与主机(以8051为例)接口时,可通过8051的I/O端口P1.0~P2.3来控制HCTL-1100的读/写、输出使能、片选、地址锁存和复位等控制引脚。其部分软件程序如下:
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
RD1100:SETB P2.0 ;设置读/写状态为读
P.L.C.技.术.网——可编程控制器技术门户
MOV P,1B ;锁存地址
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
CLR P2.3 ;锁存地址
WWW_PLCJS@_COM%-PLC-技.术_网
CLR P2.3 ;发地址锁存信号脉冲
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
SETB P2.3
WW.W_PLC※JS_C,OM-PL,C-技.术_网
MOV P1,#0FFH
WWW_PLCJS@_COM%-PLC-技.术_网
CLR P2.2 ;发片选信号脉冲
WWW_PLCJS@_COM%-PLC-技.术_网
SETB P2.2
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
NOP
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
NOP
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
NOP ;延时4μs,为1MHz的HCTL-1100提供足够的时间
WWW_P※LCJS_CO※M-PLC-技-.术_网
CLR P2.1 ;设置输出势能引脚为效
WW.W_PLC※JS_C,OM-PL,C-技.术_网
MOV A,P0 ;从1100获取数据
WWW_P※LCJS_COM-PLC-)技.术_网
SETB P2.1 ;使输出势能无效
WWcW_PLCJS_COM-PLC-技.术_网
RET
——可——编——程——控-制-器-技——术——门——户
WWW_P※LCJS_CO※M-PLC-技-.术_网
上一篇: 基于HCTL-1100的位置伺服控制下一篇: 没有了
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行