基于HCTL-1100的位置伺服控制
日期:2009-4-29 23:07:00 来源:本站整理
点击: 作者:loveplc
点击: 作者:loveplc
点击【 大 中 小 】放大字体.
摘要 位置伺服控制技术是数控系统中的关键技术之一。作者利用运动控制专用芯片HCTL-1100研制了与数控系统配套的交直流伺服位置环控制模块。通过研究HCTL-1100芯片的时序和有关特性,为其设计了相关的接口电路。利用开环传递函数的增益裕度、相角裕度等对HCTL-1100数字补偿器进行了设计与评估。
关键词:位置伺服控制 HCTL-1100接口 性能分析
The Position Servo Control Based on HCTL-1100
Ye Peiqing Yang Xiangdong
Abstract The technique of position servo control is one of the key techniques in machine tools CNC system.The position control module to be used in AC & DC servo system has been designed with the special motion control integrated circuit HCTL-1100,after the postulate of position servo control for machine tools CNC system has been analyzed.The characteristics and time sequence of HCTL-1100 are studied in detail,the interface circuit have been designed and evaluated with the concept of gain affluence and phase angle affluence of open loop transfer function.
Key words:position servo control;interface of HCTL-1100; characteristics analysis
1 引言
进给伺服系统是CNC控制器与机械传动的接口部件,直接决定数控机床的生产效率、加工精度等重要指标。用于机床数控的伺服系统要求具有调速范围宽、速度稳定性高、随动快、定位精度高、重复定位误差小等指标。
传统的交、直流伺服控制一般到速度环为止,而在数控机床的进给坐标轴中,最终要控制的不仅有速度、加速度,更重要的却是位置量,所以位置环的实现成为数控系统的重要任务,位置环控制的品质也成为衡量其性能的一个重要指标。适用于机床配套和改造的系统,一般采用典型的速度内环和位置外环构成P-PI位置调节系统,如图1所示。本文主要对位置环控制进行研究与设计,选择HCTL-1100芯片作为其控制核心。
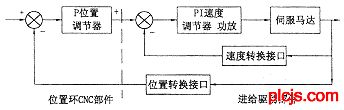
图1 数控系统采用的位置调节系统
2 HCTL-1100芯片性能简介
HCTL-1100是美国HP公司新推出的通用型、高性能电机运动控制芯片,其内部原理如图2所示。
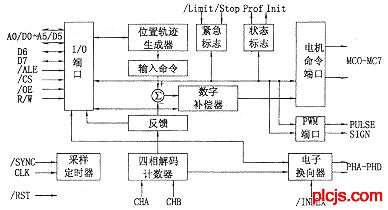
图2 HCTL-1100的结构原理图
2.1 HCTL-1100的主要性能特点
(1)可控制多种电机,包括无刷电机、伺服电机、步进电机。
(2)可给用户提供位置控制、速度控制等四种控制方式。
(3)内部有可编程的数字补偿网络,对闭环系统的传递函数能提供一定的校正作用,使之在所需的系统带宽内,具有合适的相角裕度和幅值裕度。
(4)和CPU的接口是8位双向总线,其中6位采用地址/数据复用方式工作,另外2位只传递数据信号。对于CPU,HCTL相当于64个控制寄存器,按照一定的格式读、写寄存器,可以启动相应的控制操作。
(5)具有SYNC同步引脚,易于实现多轴联动。
(6)具有光电编码器的反馈输入CHA、CHB、/INDEX。
2.2 HCTL-1100的控制寄存器
HCTL的工作由64个8位内部寄存器控制,这些寄存器包含了正确控制HCTL的命令和配置信息,例如:
(1)电机命令寄存器(R08H):此寄存器的值即为电机命令端口的输出,HCTL在控制模式下根据控制规律控制此寄存器。
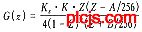
(2)数字补偿寄存器:它包括零点寄存器(R20H),极点寄存器(R21H),增益寄存器(R22H)。由于HCTL构成的控制系统多为闭环,为满足闭环系统工作稳定性要求,HCTL内部设计了数字补偿功能环节,其传递函数为:
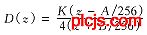
(K、A、B∈[0,256]的单字节)
只要适当地选取三个寄存器的值,就能满足大部分控制的需要。
(3)采样时间计数器(R0FH):HCTL实质上是一个数字采样系统,在每一周期中,根据采样值和当前值计算输出,采样周期由R0FH中的数决定,其关系为:
t=16(T+1)/fclk
式中 fclk——HCTL工作时钟频率
T——采样周期,R0FH中的值
3 硬件接口电路
利用HCTL-1100设计的位置环控制系统,其总体结构如图3所示。需要注意的是,由于HCTL-1100本身也包含一个微处理器,它的读写控制逻辑有其特殊性,不能简单地用/IOR、/IOW实现读写控制,必须有读写控制逻辑电路接口。
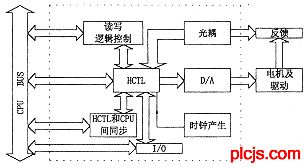
图3 位置伺服控制总体结构框图
通过仔细研究HCTL的控制时序,可以发现HCTL一方面要求用/CS的上升沿(地址信号无效时刻)锁存有效数据,另一方面要求/CS的上升沿必须对应于R/W信号的有效部分。而PC机的地址信号在整个周期内基本上全有效,待其无效时,已不存在有效数据,如图4所示CPU是利用/IOW的上升沿锁存有效数据。因此可以用地址片选信号(/CS)和/IOW的“与”逻辑来控制HCTL-1100的片选信号(/CS)实现,以保证/CS不仅起到选通作用,而且可以利用其上升沿锁存有效数据。把/IOW延时后再接至HCTL-1100的R/W,以使其落后于HCTL-1100的片选信号(/CS)一段时间,保证/CS的上升沿对应于R/W信号的有效部分。
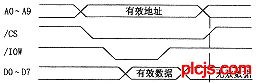
图4 PC写操作示意图
4 位置调节环参数设计和性能分析
位置调节环的作用是使进给驱动系统输出的实际位置跟随输入指令。机床控制对位置调节的要求是输出以尽可能小的误差跟随输入,并且不产生超调。对于图1所示结构的半闭环系统,速度环按电流型矢量控制,可以简化为比例环节,位置环采用HCTL实现,得到系统的数字模型如图5所示。

图5 电流型矢量控制下伺服系统数学模型框图
其开环传递函数为:
式中 Ks=KD.KA.KMC.N/2π
N——编码器刻线数
KMC——电机增益常数
KMC=KT/(Jm+JL)(rad/A.s2)
Jm——电机惯量
JL——负载惯量
KT——电机电气时间常数,Nm/A
采用时间为T。
用HCTL-1100设计的位置环控制卡,配合日本东荣电气公司的伺服电机VLBSE-07512,伺服驱动器VLBSE-020P,构成位置伺服控制系统。各参数为:KD=20/256,KA=10,N=1000,KT=99Nm/A,Jm=0.016,JL=2Nm,经仿真计算在T=4ms,A=218,B=254,K=44参数控制下,其单位阶跃(一个脉冲当量)函数响应如图6所示。实验证明,系统定位精度和随动性都能满足机床控制要求。
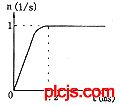
图6 单位阶跃响应
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
摘要 位置伺服控制技术是数控系统中的关键技术之一。作者利用运动控制专用芯片HCTL-1100研制了与数控系统配套的交直流伺服位置环控制模块。通过研究HCTL-1100芯片的时序和有关特性,为其设计了相关的接口电路。利用开环传递函数的增益裕度、相角裕度等对HCTL-1100数字补偿器进行了设计与评估。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
关键词:位置伺服控制 HCTL-1100接口 性能分析
plcjs.技.术_网
The Position Servo Control Based on HCTL-1100
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
Ye Peiqing Yang Xiangdong
WWW_PLCJS_COM-PLC-技.术_网
Abstract The technique of position servo control is one of the key techniques in machine tools CNC system.The position control module to be used in AC & DC servo system has been designed with the special motion control integrated circuit HCTL-1100,after the postulate of position servo control for machine tools CNC system has been analyzed.The characteristics and time sequence of HCTL-1100 are studied in detail,the interface circuit have been designed and evaluated with the concept of gain affluence and phase angle affluence of open loop transfer function.
P.L.C.技.术.网——可编程控制器技术门户
Key words:position servo control;interface of HCTL-1100; characteristics analysis
WWW.PLCJS.COM——可编程控制器技术门户
1 引言
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
进给伺服系统是CNC控制器与机械传动的接口部件,直接决定数控机床的生产效率、加工精度等重要指标。用于机床数控的伺服系统要求具有调速范围宽、速度稳定性高、随动快、定位精度高、重复定位误差小等指标。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
传统的交、直流伺服控制一般到速度环为止,而在数控机床的进给坐标轴中,最终要控制的不仅有速度、加速度,更重要的却是位置量,所以位置环的实现成为数控系统的重要任务,位置环控制的品质也成为衡量其性能的一个重要指标。适用于机床配套和改造的系统,一般采用典型的速度内环和位置外环构成P-PI位置调节系统,如图1所示。本文主要对位置环控制进行研究与设计,选择HCTL-1100芯片作为其控制核心。
WWW_P※LCJS_COM-PLC-)技.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
图1 数控系统采用的位置调节系统
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
2 HCTL-1100芯片性能简介
WW.W_PLC※JS_C,OM-PL,C-技.术_网
HCTL-1100是美国HP公司新推出的通用型、高性能电机运动控制芯片,其内部原理如图2所示。
WWW_PLCJS@_COM%-PLC-技.术_网
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
图2 HCTL-1100的结构原理图
WWcW_PLCJS_COM-PLC-技.术_网
2.1 HCTL-1100的主要性能特点
WWW_P※LCJS_CO※M-PLC-技-.术_网
(1)可控制多种电机,包括无刷电机、伺服电机、步进电机。
WWW_PLCJS@_COM%-PLC-技.术_网
(2)可给用户提供位置控制、速度控制等四种控制方式。
WWW_P※LCJS_COM-PLC-)技.术_网
(3)内部有可编程的数字补偿网络,对闭环系统的传递函数能提供一定的校正作用,使之在所需的系统带宽内,具有合适的相角裕度和幅值裕度。
plcjs.技.术_网
(4)和CPU的接口是8位双向总线,其中6位采用地址/数据复用方式工作,另外2位只传递数据信号。对于CPU,HCTL相当于64个控制寄存器,按照一定的格式读、写寄存器,可以启动相应的控制操作。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
(5)具有SYNC同步引脚,易于实现多轴联动。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
(6)具有光电编码器的反馈输入CHA、CHB、/INDEX。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
2.2 HCTL-1100的控制寄存器
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
HCTL的工作由64个8位内部寄存器控制,这些寄存器包含了正确控制HCTL的命令和配置信息,例如:
P.L.C.技.术.网——可编程控制器技术门户
(1)电机命令寄存器(R08H):此寄存器的值即为电机命令端口的输出,HCTL在控制模式下根据控制规律控制此寄存器。
WWcW_PLCJS_COM-PLC-技.术_网
(2)数字补偿寄存器:它包括零点寄存器(R20H),极点寄存器(R21H),增益寄存器(R22H)。由于HCTL构成的控制系统多为闭环,为满足闭环系统工作稳定性要求,HCTL内部设计了数字补偿功能环节,其传递函数为:
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PLC※JS_COM-PmLC-技.术_网
(K、A、B∈[0,256]的单字节)
WWcW_PLCJS_COM-PLC-技.术_网
只要适当地选取三个寄存器的值,就能满足大部分控制的需要。
WWW_PL※CJS_COM-PLC-技.术_网
(3)采样时间计数器(R0FH):HCTL实质上是一个数字采样系统,在每一周期中,根据采样值和当前值计算输出,采样周期由R0FH中的数决定,其关系为:
WWW_P※LCJS_COM-PLC-)技.术_网
t=16(T+1)/fclk
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
式中 fclk——HCTL工作时钟频率
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
T——采样周期,R0FH中的值
WWW_PLC※JS_COM-PmLC-技.术_网
3 硬件接口电路
WWW_PL※CJS_COM-PLC-技.术_网
利用HCTL-1100设计的位置环控制系统,其总体结构如图3所示。需要注意的是,由于HCTL-1100本身也包含一个微处理器,它的读写控制逻辑有其特殊性,不能简单地用/IOR、/IOW实现读写控制,必须有读写控制逻辑电路接口。
WWW_PLCJS@_COM%-PLC-技.术_网
WWW_PLCJS_COM-PLC-技.术_网
图3 位置伺服控制总体结构框图
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
通过仔细研究HCTL的控制时序,可以发现HCTL一方面要求用/CS的上升沿(地址信号无效时刻)锁存有效数据,另一方面要求/CS的上升沿必须对应于R/W信号的有效部分。而PC机的地址信号在整个周期内基本上全有效,待其无效时,已不存在有效数据,如图4所示CPU是利用/IOW的上升沿锁存有效数据。因此可以用地址片选信号(/CS)和/IOW的“与”逻辑来控制HCTL-1100的片选信号(/CS)实现,以保证/CS不仅起到选通作用,而且可以利用其上升沿锁存有效数据。把/IOW延时后再接至HCTL-1100的R/W,以使其落后于HCTL-1100的片选信号(/CS)一段时间,保证/CS的上升沿对应于R/W信号的有效部分。
WW.W_PLCJS_COM-PLC-技.术_网
WWW_PLCJS@_COM%-PLC-技.术_网
图4 PC写操作示意图
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
4 位置调节环参数设计和性能分析
WW.W_PLC※JS_C,OM-PL,C-技.术_网
位置调节环的作用是使进给驱动系统输出的实际位置跟随输入指令。机床控制对位置调节的要求是输出以尽可能小的误差跟随输入,并且不产生超调。对于图1所示结构的半闭环系统,速度环按电流型矢量控制,可以简化为比例环节,位置环采用HCTL实现,得到系统的数字模型如图5所示。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WWW_PLCJS@_COM%-PLC-技.术_网
图5 电流型矢量控制下伺服系统数学模型框图
WWW_PLC※JS_COM-PmLC-技.术_网
其开环传递函数为:
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
plcjs.技.术_网
式中 Ks=KD.KA.KMC.N/2π
——可——编——程——控-制-器-技——术——门——户
N——编码器刻线数
plcjs.技.术_网
KMC——电机增益常数
WWW.PLCJS.COM——可编程控制器技术门户
KMC=KT/(Jm+JL)(rad/A.s2)
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
Jm——电机惯量
WWW_PLCJS_COM-PLC-技.术_网
JL——负载惯量
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
KT——电机电气时间常数,Nm/A
W1WW_P4LCJS_COM-PLC-技.术_网
采用时间为T。
WWW_PLCJS_COM-PLC-技.术_网
用HCTL-1100设计的位置环控制卡,配合日本东荣电气公司的伺服电机VLBSE-07512,伺服驱动器VLBSE-020P,构成位置伺服控制系统。各参数为:KD=20/256,KA=10,N=1000,KT=99Nm/A,Jm=0.016,JL=2Nm,经仿真计算在T=4ms,A=218,B=254,K=44参数控制下,其单位阶跃(一个脉冲当量)函数响应如图6所示。实验证明,系统定位精度和随动性都能满足机床控制要求。
WWW_PLCJS_COM-PLC-技.术_网
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
图6 单位阶跃响应
plcjs.技.术_网
上一篇: 直流电机驱动电路设计下一篇: 没有了
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行