基于SJA1000的现场总线多轴运动控制研究
日期:2007-5-24 23:31:10 来源:本文摘自《PLC&FA》
点击: 作者:未知
点击: 作者:未知
点击【 大 中 小 】放大字体.
现场总线作为一种先进的工业控制技术,将当今网络通信与信息管理的观念带入工业控制领域。单个分散的测量控制设备变成网络节点,以现场总线为纽带,将它们连接成可以相互沟通信息、共同完成自控任务的网络系统与控制系统,它是工厂的底层控制网络。
根据国际IEC1158标准定义,现场总线是一种互连现场自动化设备及其控制系统的双向数字通信协议。也就是说现场总线是控制系统中底层的通信网络具有双向数字传输功能,在控制系统中允许智能现场装置全数字化、多变量、双向、多节点,并通过一条物理媒体互相交换信息。
在近年来,随着工业自动化的快速发展,而使得机器设备上的运动控制系统出现了以下几点技术需求:
(1)多轴运动控制。机器设备因自动化程度提高而使得单一机器上所需要的轴数增多,一台设备上十几轴是常见的事情。在轴数变多后,如何协调各轴动作就是一个重要的课题。
(2)体积要小。由于厂房空间的限制,机器的体积要求越小越好,机器内控制器的体积也就被要求愈来愈小,相对的走线空间也愈来愈小。
(3)要更精确。随着半导体制程已经精密到100nm一下,在制程及检测相关设备所要求的运动精度也要更精确,其它如LCD设备,SMD制程设备也有相同要求。
(4)要更稳定。因为所有设备的投资经费庞大,系统停机的成本就更显的突出,因此所有机器设备制造商都必须追求系统的稳定性。同时也必须考虑在组件损坏要维修时,必须能快速替换且不出差错。
综合以上几点的需求分析可以看到,既要在一个控制器内进行多轴运动控制,又要控制器的体积更小,配线的维修要更更容易,这些条件看来是相冲突的。而使用现场总线技术便可以解决这些问题。
SJA1000的主要特点如下:(1)引脚和电气特性与独立CAN总线控制器PCA82C200完全兼容,使该芯片能应用于原有的基于PCA82C200的应用中,以达到性能升级;(2)软件与PCA82C200兼容(缺省为基本CAN模式);(3)扩展接收缓冲器(64字节FIFO),可以存储高达21个报文,这延长了最大中断服务时间,避免了数据超载;(4)支持CAN2.0B时,同时支持11和29位标识符,允许在同一系统应用这两种帧结构;(5)采用24MHz时钟频率,位通讯速率为1Mbits/s;(6)提供了增强CAN模式(PeliCAN);(7)支持多种微处理器接口,可以支持Intel体系和Motorola体系的不同类型处理器;(8)提供可编程CAN输出驱动配置;(9)工作温度范围为-40~+125℃。
1 引言WWW_PLCJS_COM-PLC-技.术_网
运动控制在工业生产中的作用举足轻重。伺服控制是运动控制中的重要分支。尤其21世纪以来,市场对伺服控制产品的需求方兴未艾,各行各业都对伺服控制产品有着越来越旺盛的需求,同时人们对伺服控制系统性能的要求也越来越高。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
现场总线作为一种先进的工业控制技术,将当今网络通信与信息管理的观念带入工业控制领域。单个分散的测量控制设备变成网络节点,以现场总线为纽带,将它们连接成可以相互沟通信息、共同完成自控任务的网络系统与控制系统,它是工厂的底层控制网络。
WWcW_PLCJS_COM-PLC-技.术_网
根据国际IEC1158标准定义,现场总线是一种互连现场自动化设备及其控制系统的双向数字通信协议。也就是说现场总线是控制系统中底层的通信网络具有双向数字传输功能,在控制系统中允许智能现场装置全数字化、多变量、双向、多节点,并通过一条物理媒体互相交换信息。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
在近年来,随着工业自动化的快速发展,而使得机器设备上的运动控制系统出现了以下几点技术需求:
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
(1)多轴运动控制。机器设备因自动化程度提高而使得单一机器上所需要的轴数增多,一台设备上十几轴是常见的事情。在轴数变多后,如何协调各轴动作就是一个重要的课题。
W1WW_P4LCJS_COM-PLC-技.术_网
(2)体积要小。由于厂房空间的限制,机器的体积要求越小越好,机器内控制器的体积也就被要求愈来愈小,相对的走线空间也愈来愈小。
WWW_PLCJS_COM-PLC-技.术_网
(3)要更精确。随着半导体制程已经精密到100nm一下,在制程及检测相关设备所要求的运动精度也要更精确,其它如LCD设备,SMD制程设备也有相同要求。
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
(4)要更稳定。因为所有设备的投资经费庞大,系统停机的成本就更显的突出,因此所有机器设备制造商都必须追求系统的稳定性。同时也必须考虑在组件损坏要维修时,必须能快速替换且不出差错。
WWW_P※LCJS_COM-PLC-)技.术_网
综合以上几点的需求分析可以看到,既要在一个控制器内进行多轴运动控制,又要控制器的体积更小,配线的维修要更更容易,这些条件看来是相冲突的。而使用现场总线技术便可以解决这些问题。
WWW_P※LCJS_COM-PLC-)技.术_网
2 SJA1000主要特点及结构WWW_PLC※JS_COM-PmLC-技.术_网
SJA1000是一种能应用于一般工业环境的独立CAN总线控制器,经过简单总线连接可完成报文控制、数据滤波等CAN总线的物理层和数据链路层的功能。其硬件与软件设计不仅兼容PCA82C200的基本CAN模式BasicCAN,还支持增强CAN模式PeliCAN。
plcjs.技.术_网
SJA1000的主要特点如下:(1)引脚和电气特性与独立CAN总线控制器PCA82C200完全兼容,使该芯片能应用于原有的基于PCA82C200的应用中,以达到性能升级;(2)软件与PCA82C200兼容(缺省为基本CAN模式);(3)扩展接收缓冲器(64字节FIFO),可以存储高达21个报文,这延长了最大中断服务时间,避免了数据超载;(4)支持CAN2.0B时,同时支持11和29位标识符,允许在同一系统应用这两种帧结构;(5)采用24MHz时钟频率,位通讯速率为1Mbits/s;(6)提供了增强CAN模式(PeliCAN);(7)支持多种微处理器接口,可以支持Intel体系和Motorola体系的不同类型处理器;(8)提供可编程CAN输出驱动配置;(9)工作温度范围为-40~+125℃。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WW.W_PLC※JS_C,OM-PL,C-技.术_网
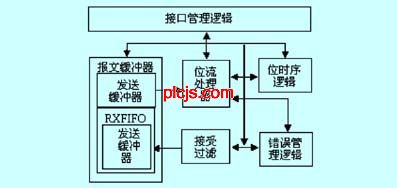
图1 SJA1000的内部结构方框图
WWW_PLCJS@_COM%-PLC-技.术_网
SJA1000的内部结构如图1所示,主要由接口管理逻辑IML、报文缓冲器(含发送缓冲器TXB和接收缓冲器RXFIFO)、位流处理器BSP、接收过滤器ASP、位时序处理逻辑BTL、错误管理逻辑EML、内部振荡器及复位电路等构成。IML接收来自CPU的命令,控制CAN寄存器的寻址并向主控器提供中断信息及状态信息。CPU的控制经IML把要发送的数据写入TXB,TXB中的数据由BSP处理后经BTL输出到CAN BUS。BTL始终监视CAN BUS,当检测到有效的信息头“隐性电平-控制电平”的转换时启动接收过程,接收的信息首先要由位流处理器BSP处理,并由ASP过滤,只有当接收的信息的识别码与ASP检验相符时,接收信息才最终被写入RXB或RXFIFO中。RXFIFO最多可以缓存64字节的数据,该数据可被CPU读取。EML负责传送层中调制器的错误管制,它接收BSP的出错报告,促使BSP和IML进行错误统计。
WWW.PLCJS.COM——可编程控制器技术门户
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行