自调匀整技术是前纺最重要的要素(上)
日期:2008-11-1 23:19:03 来源:中国自动化网
点击: 作者:
点击: 作者:
点击【 大 中 小 】放大字体.
自调匀整的研究始于20世纪60年代,随着电子和计算机技术的发展,自调匀整装置在原有作用原理的基础上,控制技术和实现手段都有很大的发展,在现代纺纱生产中的作用已十分重要。
1 并条机自调匀整装置介绍
1.1 控制方式
自调匀整的控制方式可分为开环、闭环和混合环三种形式。开环系统属针对性匀整,适合短片段不匀,闭环系统适合长片段不匀,混合环系统能兼长短片段不匀,但机构复杂,制造精度要求很高。并条工序对控制成纱重量不匀和重量偏差指标有非常重要的把关作用,对匀整的针对性具有较高的要求。从目前的情况看,在并条机上具有良好作用的自调匀整大都属开环系统,只要其主要工艺(如延迟时间)设置良好,匀整效果十分理想。
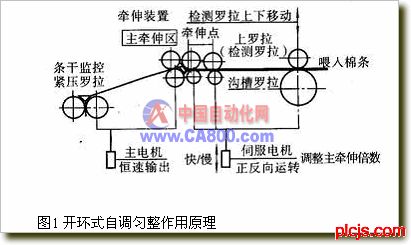
USC型、USG型自调匀整装置,其作用原理如图1所示。4根-8根条子由导条架喂入,通过给棉罗拉,进入沟槽罗拉与检测罗拉组成的检测机构,然后扩展成棉网进入牵伸装置。检测机构上下罗拉间保持有一定的压力,随喂入条子单位长度重量的不同检测罗拉上下移动,由位移传感器发出讯号,检测相应断面到达主牵伸区时,伺服电机变速,调整主牵伸区牵伸倍数,以达到匀整出条条干的目的,同时在紧压罗拉处,对出条条干进行在线监控,在线检测匀整结果经微机统计比较,在荧光屏上以数字和图表方式显示出条子的质量数据。在线检测的FP喇叭头还能不断核对出条号数和出条实际条干不匀,如果超出已设定的警报界限时,并条机能自动停车并发出报警信号,显示器还能随时显示多项工艺、质量、产量等统计数据。
USC、USG型自调匀整的传动机构采用机电组合差速合成方式,这种方式具有控制功率小、伺服电机故障不影响主机运行,控制方法简单等较为突出的优点。匀整范围有土10%;±15%、±20%和土25%四档;适宜纤维长度为22 mm~100mm;控制精度土1%;在线检测统计班产、总产、效率、生产时间;出条监测重量偏差(A%)、出条(CV值)及不同片段重量CV值(CVl m、CV3 m、CVl0m、CVl00m),是一种对前纺中短片段具有完整在线检测功能的自调匀整装置。
1.2 牵伸调节方式
自调匀整装置是通过改变牵伸罗拉的速度来调节牵伸倍数的,可以改变后罗拉的速度,也可以改变前罗拉的速度。在自调匀整装置中,调节前罗拉速度或调节后罗拉速度各有优缺点。从负荷上看,希望调速部分的功率愈小愈好,以降低系统的设备费用。调节后罗拉速度一般所需要功率比前罗拉小,也比较容易满足系统对惯性的要求;从提高系统的调节精度来看,前罗拉速度比后罗拉调节有利,因为前罗拉的转速比后罗拉速度高,转速误差率可降低。另外,调速部分一般作高速运转,这样,减速齿轮系统可尽量减少,因而,也减小了齿轮误差。但在前罗拉变速时,必须同时改变紧压罗拉、圈条器等的速度,因为其负荷大,相应的惯性也大,有时不易满足系统的惯性要求。后罗拉变速则不同,由于速度低,如果速度变化仅百分之几,则误差就大,而且,后罗拉变速时整个喂入机构,如导条架、检测机构及后罗拉等的速度都要变化,容易产生意外牵伸;前罗拉变速时,牵伸倍数与喂入纱条的重量变化为线性关系;而后罗拉变速时,则为双曲线关系。在调整时,线性关系比较容易调节。
实际上,由于并条机出条速度的不断提高,较少考虑前罗拉速度的改变。同时,随着并条机牵伸机构的不断改进完善,往往将牵伸区分成两部分,在工艺侧重点上有所区别,自调匀整在调节牵伸时也应考虑尽量少改变原有的前后牵伸区的牵伸配置,特别是对牵伸质量影响较大的后区牵伸倍数,避免恶化条干。SH802-E型并条机上的USC型自调匀整装置是通过改变Ⅱ、Ⅲ、Ⅳ罗拉的速度,I罗拉速度保持不变。这种调节方式保持后区牵伸倍数不变,而以Ⅱ、Ⅲ罗拉速度的改变来调节前区牵伸倍数。
有的自调匀整装置保持并条机主牵伸倍数不变,专门设计一个预牵伸区进行牵伸调节,如在主牵伸区后方设置一对简单罗拉,须条在进入主牵伸前先进入预牵伸区,经过自调匀整的作用,使进入主牵伸区的条子定量均匀一致。采用这种方式,应在工艺上避免因增加一个牵伸性能并不完善的预牵伸区而恶化条干。
1.3 喂入检测系统
喂人检测系统的作用是将喂入须条的不匀变化以某种信号反应出来,有机械式、电气式及气流检测等多种不同的方式,因后两者对外界因素(纤维品种、纤维分布状况、温湿度等)变化较敏感,使检测信号不够稳定,目前,使用较成熟的技术是机械电器结合式检测,如利用一线位移传感器配合一对凹凸罗拉(对输入棉条进行连续测量),其工作原理是凹罗拉固定不动,凸罗拉通过弹簧加压紧靠在凹罗拉上,形成一测量钳口。由于钳口中棉条粗细的变化,使凸罗拉推动传感器的探头发出信号。根据位移量的大小,传感器输出相应的电压值,该值与棉条输入量有良好的线性关系,同时得到放大和传送。这种结构的优点
是测量稳定可靠,不易受外界干扰,操作使用方便。为使凹凸罗拉组成的测量钳口能正确反应须条不匀的变化,要合理设置测量罗拉加压、直径和沟槽宽度等参数,同时还要注意须条定量、回潮率、结构性状等对测量信号的影响,不同品种可以设置不同的测量参数。USC型、USD型自调匀整均根据不同的匀整范围设置了最大测量偏差,并提供了不同的测量罗拉槽宽度。
1.4控制计算机
控制计算机是整个自调匀整系统的核心。选择工业级的主CPU减少了外围控制元件。因为整个系统共有8个采样点,为减少采样等待时间,减少主CPU的负担,单独设计了一个采样子系统,该子系统由单片机控制,它将所有信号采集后,通过并行接口传输到主CPU。此外,硬件设计上采取了许多有效的措施,如掉电保护电路的设计采用了电源掉电信号控制、片选控制、掉电中断控制以及锂电池的保护处理等,达到了在任何状态下的数据均完整可靠的设计目标。
软件设计采用了实时操作系统进行控制设计。主程序中,设计了内容丰富的6级菜单系统。通过这些菜单,可以直接观察系统内的各项工艺数据,可以输入各种控制参数,能对显示菜单进行更改。此外,设计中还增加了自检和测试功能,通过显示面板就可以了解整个系统的工作情况。
1.5 伺服系统
伺服系统主要包括控制电机、伺服控制器、刹车控制器和大功率变压器等。控制电机使用无刷类电机,选择功率为1.2 kW的交流伺服电机。电机刹车控制板用于吸收电机减速运行时反馈给控制器的能量。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
1 并条机自调匀整装置介绍
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
1.1 控制方式
WWW_P※LCJS_COM-PLC-)技.术_网
自调匀整的控制方式可分为开环、闭环和混合环三种形式。开环系统属针对性匀整,适合短片段不匀,闭环系统适合长片段不匀,混合环系统能兼长短片段不匀,但机构复杂,制造精度要求很高。并条工序对控制成纱重量不匀和重量偏差指标有非常重要的把关作用,对匀整的针对性具有较高的要求。从目前的情况看,在并条机上具有良好作用的自调匀整大都属开环系统,只要其主要工艺(如延迟时间)设置良好,匀整效果十分理想。
P.L.C.技.术.网——可编程控制器技术门户
USC型、USG型自调匀整装置,其作用原理如图1所示。4根-8根条子由导条架喂入,通过给棉罗拉,进入沟槽罗拉与检测罗拉组成的检测机构,然后扩展成棉网进入牵伸装置。检测机构上下罗拉间保持有一定的压力,随喂入条子单位长度重量的不同检测罗拉上下移动,由位移传感器发出讯号,检测相应断面到达主牵伸区时,伺服电机变速,调整主牵伸区牵伸倍数,以达到匀整出条条干的目的,同时在紧压罗拉处,对出条条干进行在线监控,在线检测匀整结果经微机统计比较,在荧光屏上以数字和图表方式显示出条子的质量数据。在线检测的FP喇叭头还能不断核对出条号数和出条实际条干不匀,如果超出已设定的警报界限时,并条机能自动停车并发出报警信号,显示器还能随时显示多项工艺、质量、产量等统计数据。
WWW_P※LCJS_CO※M-PLC-技-.术_网
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
USC、USG型自调匀整的传动机构采用机电组合差速合成方式,这种方式具有控制功率小、伺服电机故障不影响主机运行,控制方法简单等较为突出的优点。匀整范围有土10%;±15%、±20%和土25%四档;适宜纤维长度为22 mm~100mm;控制精度土1%;在线检测统计班产、总产、效率、生产时间;出条监测重量偏差(A%)、出条(CV值)及不同片段重量CV值(CVl m、CV3 m、CVl0m、CVl00m),是一种对前纺中短片段具有完整在线检测功能的自调匀整装置。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
1.2 牵伸调节方式
plcjs.技.术_网
自调匀整装置是通过改变牵伸罗拉的速度来调节牵伸倍数的,可以改变后罗拉的速度,也可以改变前罗拉的速度。在自调匀整装置中,调节前罗拉速度或调节后罗拉速度各有优缺点。从负荷上看,希望调速部分的功率愈小愈好,以降低系统的设备费用。调节后罗拉速度一般所需要功率比前罗拉小,也比较容易满足系统对惯性的要求;从提高系统的调节精度来看,前罗拉速度比后罗拉调节有利,因为前罗拉的转速比后罗拉速度高,转速误差率可降低。另外,调速部分一般作高速运转,这样,减速齿轮系统可尽量减少,因而,也减小了齿轮误差。但在前罗拉变速时,必须同时改变紧压罗拉、圈条器等的速度,因为其负荷大,相应的惯性也大,有时不易满足系统的惯性要求。后罗拉变速则不同,由于速度低,如果速度变化仅百分之几,则误差就大,而且,后罗拉变速时整个喂入机构,如导条架、检测机构及后罗拉等的速度都要变化,容易产生意外牵伸;前罗拉变速时,牵伸倍数与喂入纱条的重量变化为线性关系;而后罗拉变速时,则为双曲线关系。在调整时,线性关系比较容易调节。
WWW_P※LCJS_CO※M-PLC-技-.术_网
实际上,由于并条机出条速度的不断提高,较少考虑前罗拉速度的改变。同时,随着并条机牵伸机构的不断改进完善,往往将牵伸区分成两部分,在工艺侧重点上有所区别,自调匀整在调节牵伸时也应考虑尽量少改变原有的前后牵伸区的牵伸配置,特别是对牵伸质量影响较大的后区牵伸倍数,避免恶化条干。SH802-E型并条机上的USC型自调匀整装置是通过改变Ⅱ、Ⅲ、Ⅳ罗拉的速度,I罗拉速度保持不变。这种调节方式保持后区牵伸倍数不变,而以Ⅱ、Ⅲ罗拉速度的改变来调节前区牵伸倍数。
WWW_PLCJS_COM-PLC-技.术_网
有的自调匀整装置保持并条机主牵伸倍数不变,专门设计一个预牵伸区进行牵伸调节,如在主牵伸区后方设置一对简单罗拉,须条在进入主牵伸前先进入预牵伸区,经过自调匀整的作用,使进入主牵伸区的条子定量均匀一致。采用这种方式,应在工艺上避免因增加一个牵伸性能并不完善的预牵伸区而恶化条干。
WWW_PLCJS@_COM%-PLC-技.术_网
1.3 喂入检测系统
WW.W_PLCJS_COM-PLC-技.术_网
喂人检测系统的作用是将喂入须条的不匀变化以某种信号反应出来,有机械式、电气式及气流检测等多种不同的方式,因后两者对外界因素(纤维品种、纤维分布状况、温湿度等)变化较敏感,使检测信号不够稳定,目前,使用较成熟的技术是机械电器结合式检测,如利用一线位移传感器配合一对凹凸罗拉(对输入棉条进行连续测量),其工作原理是凹罗拉固定不动,凸罗拉通过弹簧加压紧靠在凹罗拉上,形成一测量钳口。由于钳口中棉条粗细的变化,使凸罗拉推动传感器的探头发出信号。根据位移量的大小,传感器输出相应的电压值,该值与棉条输入量有良好的线性关系,同时得到放大和传送。这种结构的优点
WWW_P※LCJS_CO※M-PLC-技-.术_网
是测量稳定可靠,不易受外界干扰,操作使用方便。为使凹凸罗拉组成的测量钳口能正确反应须条不匀的变化,要合理设置测量罗拉加压、直径和沟槽宽度等参数,同时还要注意须条定量、回潮率、结构性状等对测量信号的影响,不同品种可以设置不同的测量参数。USC型、USD型自调匀整均根据不同的匀整范围设置了最大测量偏差,并提供了不同的测量罗拉槽宽度。
WWW.PLCJS.COM——可编程控制器技术门户
1.4控制计算机
WWcW_PLCJS_COM-PLC-技.术_网
控制计算机是整个自调匀整系统的核心。选择工业级的主CPU减少了外围控制元件。因为整个系统共有8个采样点,为减少采样等待时间,减少主CPU的负担,单独设计了一个采样子系统,该子系统由单片机控制,它将所有信号采集后,通过并行接口传输到主CPU。此外,硬件设计上采取了许多有效的措施,如掉电保护电路的设计采用了电源掉电信号控制、片选控制、掉电中断控制以及锂电池的保护处理等,达到了在任何状态下的数据均完整可靠的设计目标。
WWW_PLCJS_COM-PLC-技.术_网
软件设计采用了实时操作系统进行控制设计。主程序中,设计了内容丰富的6级菜单系统。通过这些菜单,可以直接观察系统内的各项工艺数据,可以输入各种控制参数,能对显示菜单进行更改。此外,设计中还增加了自检和测试功能,通过显示面板就可以了解整个系统的工作情况。
WWW_PL※CJS_COM-PLC-技.术_网
1.5 伺服系统
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
伺服系统主要包括控制电机、伺服控制器、刹车控制器和大功率变压器等。控制电机使用无刷类电机,选择功率为1.2 kW的交流伺服电机。电机刹车控制板用于吸收电机减速运行时反馈给控制器的能量。
WWcW_PLCJS_COM-PLC-技.术_网
上一篇: 自调匀整技术是前纺最重要的要素(下)下一篇: 采用了机电一体化技术的新型纺织机械(下)
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行