艾默生工控产品在皮带机启动控制中的应用
日期:2008-8-31 23:33:50 来源:中国自动化网
点击: 作者:
点击: 作者:
点击【 大 中 小 】放大字体.
内蒙古森鼎环保节能股份有限公司 张彬 董海英
摘要:文章介绍了艾默生公司变频器EV3000在送料皮带机上的应用,通过EC20系列PLC及模拟量处理,实现两台EV3000变频器之间的主从控制,实现皮带的平滑启动和主从运行。
Adoption of Industrial control production of Emerson in conveyor control,use EC20(PLC) adoption in principal and subordinate control.
关键词:EV3000 EC20 变频器 PLC 艾默生 皮带机 启动控制
前言:包钢炼铁厂综合料场皮带传送系统采用132KW两台电机(一主一从)进行传动。原有系统采用接触器启动。传送皮带长度大约在500米左右。正常情况下直接启动对系统没有影响,但是当发生送料过程中有意外故障而造成停机时,系统检修结束后要求再启动时,就会出现启动非常困难,造成接触器过热烧毁甚至发生因过电流造成相间短路的现象。若采用一般常用的降压软启动方式,由于启动力矩与电压的平方成正比,因此根本无法实现重载启动。为此,我们采用艾默生公司的EV3000系列高转矩、高精度变频器作为电机控制核心,配合EC20系列PLC实现两台变频器的主从控制,实现两台电机同频率或负荷平衡运转。
1、变频控制系统
1.1系统参数:
皮带电机为132KW,电流245A,四极,转速1480 R/MIN
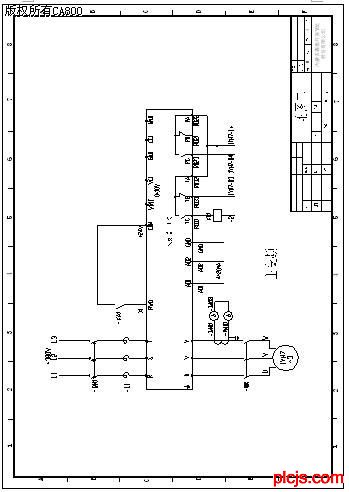
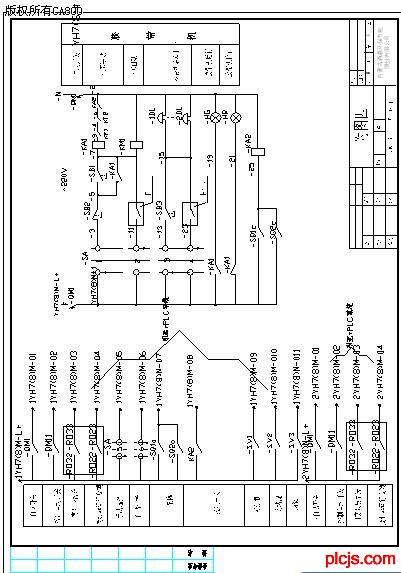
设计采用EV3000-4T132G(高性能)系列变频器。 配合EC20系列PLC及模拟量组合模块5AM(四模入、一模出),通过PLC作PID闭环控制。其中主变频器的给定采用数字量设定或模拟量设定均可,将主变频器的输出频率作为PID的给定量,将从变频器的输出频率作为PID反馈环节,PID输出量作为从变频器的给定值,从而实现主、从变频器的频率一致运行。具体原理参见附图一至五
1.2变频参数设置
主变频:
F0.02=4 V/F控制 F0.03=0 数字设定,由面板给出
F0.04=50 主机给定 F0.05=1 端子控制
F0.10=60S 加速时间 F0.11=20 减速时间
由于现场不具备电机调谐运行(接手无法打开),因此控制方式采用V/F控制,电机参数F1.00-1.08按电机实际参数设置。
F2.09=1 停机方式为自由停车
F6.08=0 AO1输出信号为实际运行频率
F6.09=3 AO2输出信号为实际运行电流
F6.12=20% AO2信号输出偏置为20%
具体原因是:由于AO2信号送入楼上控制站计算机室,控制站PLC要求信号为4-20MA。因此,当变频器输出电流信号为4MA时,对应实际电流为0;即将4MA/20MA=20% ,输出偏置即位20%。
从变频:
F0.02=4 V/F控制 F0.03=5 模拟设定,由PLC给出
F0.05=1 端子控制
F0.10=60S 加速时间 F0.11=20 减速时间
F2.09=1 停机方式为自由停车
F6.08=0 AO1输出信号为实际运行频率
F6.09=3 AO2输出信号为实际运行电流
F6.12=20% AO2信号输出偏置为20%
2、PLC控制系统
2.1 PLC硬件配置
由主机EC20-1410BRA、模拟量组合EC20-5AM (四入一出)构成。其中输入的一通道为主变频器的实际运行频率;二通道为从变频器的实际运行频率,输入信号均为4-20MA;输出为从变频器的给定值,信号为0-10V。
2.2变频控制PID程序
LD SM1
TO 0 400 16#1 1 5AM模块初始化
LD SM1
TO 0 600 16#3311 1 输入1、2通道为电流信号3、4通道关闭。
LD SM1
TO 0 650 16#0 1 输出通道为0-10V信号
LD SM1
TO 0 500 16#1 1 通道设置更改允许
LD SM1
TO 0 800 16#1 1 输入通道设置更改确认
LD SM1
TO 0 801 16#1 1 输出通道设置更改确认
LD SM0
FROM 0 100 D100 1 读通道1数值(主变频运行频率)
LD SM0
FROM 0 101 D101 1 读通道2数值(从变频运行频率)
LD SM0
MOV D101 D21 通道2数值作为PID反馈值。
LD SM0
TO 0 0 D22 1 PID输出信号从输出通道输出(作为从变频给定)
LD SM0
CALL PID_EXE 调用PID执行程序
LD SM0
CALL PID_SET 调用PID设置程序
PID子程序
LD SM0
PID D20 D21 D0 D22 //子程序的PID指令生成公式PID S1 S2 S3 D
LD SM0
MOV D100 D20 //设定目标值
MOV 10 D0 //采样时间(Ts) 范围为1~32767(ms)但比运算周期短的时间数值无法执行
MOV 33 D1 //动作方向
MOV 0 D2 //滤波时间常数
MOV 1000 D3 //比例增益(Kp) MOV 1 D4 //积分时间TI MS
MOV 0 D5 //微分增益(KD) MOV 0 D6 //微分时间
MOV 0 D15 //输入变化量MOV 0 D16 //输入变化量
MOV 2000 D17 //输出上限设MOV 0 D18 //输出下限设
2.3实际参数调整设置
最后经多次修改和调试,确定比例系数为10,积分时间为100毫秒,微分时间为零。经过运行发现能够满足现场的生产工艺,主、从皮带平稳启动。
3、连锁控制
连锁控制主要实现如下功能:
一、启动时主、从变频器一起启动,一起停止。
二、任何一台变频器故障,则另外一台变频器立即停止。
连锁控制的实现通过中间继电器(设计院设计,可以通过PLC实现)
4、实际运行情况:
经过2个月左右的运行发现,系统能够运行非常稳定,皮带启动电流为120A左右,主、从变频器启动频率完全一致,启动电流主变频器略大于从变频器,启动平稳可靠,完全能够满足生产要求。 EV3000变频器设置面板具有中文显示功能,而且参数设置非常简单,便于现场的维护;该系列变频器在过载能力方面非常的强。由于变频器在初期调试时,皮带电机的抱闸没有打开,且减速机的油泵电机没有启动,当时的过载电流几乎达到450A,在大电流限幅下运行了十几秒,变频器没有发生任何故障。
参考文献
①艾默生公司EV3000系列通用变频器 艾默生网络能源有限公司
②新型PID控制及其应用 机械工业出版社 陶永华
③EC20系统手册 艾默生网络能源有限公司
④通用变频器及其应用 机械工业出版社 韩安荣
⑤电机拖动与控制 西安电子科技大学出版社 刘保录
⑦EC20-5AM使用说明 艾默生网络能源有限公司


WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
内蒙古森鼎环保节能股份有限公司 张彬 董海英
WWW_PLCJS@_COM%-PLC-技.术_网
摘要:文章介绍了艾默生公司变频器EV3000在送料皮带机上的应用,通过EC20系列PLC及模拟量处理,实现两台EV3000变频器之间的主从控制,实现皮带的平滑启动和主从运行。
WWW_PLC※JS_COM-PmLC-技.术_网
Adoption of Industrial control production of Emerson in conveyor control,use EC20(PLC) adoption in principal and subordinate control.
WWW_PLCJS_COM-PLC-技.术_网
关键词:EV3000 EC20 变频器 PLC 艾默生 皮带机 启动控制
WWW_PLCJS@_COM%-PLC-技.术_网
前言:包钢炼铁厂综合料场皮带传送系统采用132KW两台电机(一主一从)进行传动。原有系统采用接触器启动。传送皮带长度大约在500米左右。正常情况下直接启动对系统没有影响,但是当发生送料过程中有意外故障而造成停机时,系统检修结束后要求再启动时,就会出现启动非常困难,造成接触器过热烧毁甚至发生因过电流造成相间短路的现象。若采用一般常用的降压软启动方式,由于启动力矩与电压的平方成正比,因此根本无法实现重载启动。为此,我们采用艾默生公司的EV3000系列高转矩、高精度变频器作为电机控制核心,配合EC20系列PLC实现两台变频器的主从控制,实现两台电机同频率或负荷平衡运转。
WWW_PLC※JS_COM-PmLC-技.术_网
1、变频控制系统
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
1.1系统参数:
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
皮带电机为132KW,电流245A,四极,转速1480 R/MIN
W1WW_P4LCJS_COM-PLC-技.术_网
设计采用EV3000-4T132G(高性能)系列变频器。 配合EC20系列PLC及模拟量组合模块5AM(四模入、一模出),通过PLC作PID闭环控制。其中主变频器的给定采用数字量设定或模拟量设定均可,将主变频器的输出频率作为PID的给定量,将从变频器的输出频率作为PID反馈环节,PID输出量作为从变频器的给定值,从而实现主、从变频器的频率一致运行。具体原理参见附图一至五
W1WW_P4LCJS_COM-PLC-技.术_网
1.2变频参数设置
WW.W_PLCJS_COM-PLC-技.术_网
主变频:
P.L.C.技.术.网——可编程控制器技术门户
F0.02=4 V/F控制 F0.03=0 数字设定,由面板给出
W1WW_P4LCJS_COM-PLC-技.术_网
F0.04=50 主机给定 F0.05=1 端子控制
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
F0.10=60S 加速时间 F0.11=20 减速时间
WWW.PLCJS.COM——可编程控制器技术门户
由于现场不具备电机调谐运行(接手无法打开),因此控制方式采用V/F控制,电机参数F1.00-1.08按电机实际参数设置。
WWcW_PLCJS_COM-PLC-技.术_网
F2.09=1 停机方式为自由停车
plcjs.技.术_网
F6.08=0 AO1输出信号为实际运行频率
WWcW_PLCJS_COM-PLC-技.术_网
F6.09=3 AO2输出信号为实际运行电流
——可——编——程——控-制-器-技——术——门——户
F6.12=20% AO2信号输出偏置为20%
WW.W_PLCJS_COM-PLC-技.术_网
具体原因是:由于AO2信号送入楼上控制站计算机室,控制站PLC要求信号为4-20MA。因此,当变频器输出电流信号为4MA时,对应实际电流为0;即将4MA/20MA=20% ,输出偏置即位20%。
WWW_PLCJS_COM-PLC-技.术_网
从变频:
W1WW_P4LCJS_COM-PLC-技.术_网
F0.02=4 V/F控制 F0.03=5 模拟设定,由PLC给出
WWcW_PLCJS_COM-PLC-技.术_网
F0.05=1 端子控制
WWW_PLC※JS_COM-PmLC-技.术_网
F0.10=60S 加速时间 F0.11=20 减速时间
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
F2.09=1 停机方式为自由停车
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
F6.08=0 AO1输出信号为实际运行频率
plcjs.技.术_网
F6.09=3 AO2输出信号为实际运行电流
W1WW_P4LCJS_COM-PLC-技.术_网
F6.12=20% AO2信号输出偏置为20%
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
2、PLC控制系统
plcjs.技.术_网
2.1 PLC硬件配置
P.L.C.技.术.网——可编程控制器技术门户
由主机EC20-1410BRA、模拟量组合EC20-5AM (四入一出)构成。其中输入的一通道为主变频器的实际运行频率;二通道为从变频器的实际运行频率,输入信号均为4-20MA;输出为从变频器的给定值,信号为0-10V。
WW.W_PLCJS_COM-PLC-技.术_网
2.2变频控制PID程序
WW.W_PLC※JS_C,OM-PL,C-技.术_网
LD SM1
WWW_P※LCJS_COM-PLC-)技.术_网
TO 0 400 16#1 1 5AM模块初始化
P.L.C.技.术.网——可编程控制器技术门户
LD SM1
P.L.C.技.术.网——可编程控制器技术门户
TO 0 600 16#3311 1 输入1、2通道为电流信号3、4通道关闭。
WWW.PLCJS.COM——可编程控制器技术门户
LD SM1
WWW_PL※CJS_COM-PLC-技.术_网
TO 0 650 16#0 1 输出通道为0-10V信号
WW.W_PLC※JS_C,OM-PL,C-技.术_网
LD SM1
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
TO 0 500 16#1 1 通道设置更改允许
——可——编——程——控-制-器-技——术——门——户
LD SM1
W1WW_P4LCJS_COM-PLC-技.术_网
TO 0 800 16#1 1 输入通道设置更改确认
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
LD SM1
WW.W_PLC※JS_C,OM-PL,C-技.术_网
TO 0 801 16#1 1 输出通道设置更改确认
——可——编——程——控-制-器-技——术——门——户
LD SM0
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
FROM 0 100 D100 1 读通道1数值(主变频运行频率)
WWW_P※LCJS_COM-PLC-)技.术_网
LD SM0
WWW_PLCJS_COM-PLC-技.术_网
FROM 0 101 D101 1 读通道2数值(从变频运行频率)
WWW_PLCJS_COM-PLC-技.术_网
LD SM0
WWW_PLCJS_COM-PLC-技.术_网
MOV D101 D21 通道2数值作为PID反馈值。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
LD SM0
WWW_PLCJS@_COM%-PLC-技.术_网
TO 0 0 D22 1 PID输出信号从输出通道输出(作为从变频给定)
WWW_PL※CJS_COM-PLC-技.术_网
LD SM0
WWW_PLCJS@_COM%-PLC-技.术_网
CALL PID_EXE 调用PID执行程序
plcjs.技.术_网
LD SM0
WWW_PLC※JS_COM-PmLC-技.术_网
CALL PID_SET 调用PID设置程序
WWW_PLC※JS_COM-PmLC-技.术_网
PID子程序
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
LD SM0
WWW_PLCJS_COM-PLC-技.术_网
PID D20 D21 D0 D22 //子程序的PID指令生成公式PID S1 S2 S3 D
WWW_P※LCJS_CO※M-PLC-技-.术_网
LD SM0
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
MOV D100 D20 //设定目标值
plcjs.技.术_网
MOV 10 D0 //采样时间(Ts) 范围为1~32767(ms)但比运算周期短的时间数值无法执行
WWW_PL※CJS_COM-PLC-技.术_网
MOV 33 D1 //动作方向
WW.W_PLCJS_COM-PLC-技.术_网
MOV 0 D2 //滤波时间常数
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
MOV 1000 D3 //比例增益(Kp) MOV 1 D4 //积分时间TI MS
WWW_P※LCJS_COM-PLC-)技.术_网
MOV 0 D5 //微分增益(KD) MOV 0 D6 //微分时间
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
MOV 0 D15 //输入变化量MOV 0 D16 //输入变化量
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
MOV 2000 D17 //输出上限设MOV 0 D18 //输出下限设
WWW_P※LCJS_COM-PLC-)技.术_网
2.3实际参数调整设置
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
最后经多次修改和调试,确定比例系数为10,积分时间为100毫秒,微分时间为零。经过运行发现能够满足现场的生产工艺,主、从皮带平稳启动。
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
3、连锁控制
WWW.PLCJS.COM——可编程控制器技术门户
连锁控制主要实现如下功能:
WWW_P※LCJS_COM-PLC-)技.术_网
一、启动时主、从变频器一起启动,一起停止。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
二、任何一台变频器故障,则另外一台变频器立即停止。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
连锁控制的实现通过中间继电器(设计院设计,可以通过PLC实现)
WWW_PLC※JS_COM-PmLC-技.术_网
4、实际运行情况:
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
经过2个月左右的运行发现,系统能够运行非常稳定,皮带启动电流为120A左右,主、从变频器启动频率完全一致,启动电流主变频器略大于从变频器,启动平稳可靠,完全能够满足生产要求。 EV3000变频器设置面板具有中文显示功能,而且参数设置非常简单,便于现场的维护;该系列变频器在过载能力方面非常的强。由于变频器在初期调试时,皮带电机的抱闸没有打开,且减速机的油泵电机没有启动,当时的过载电流几乎达到450A,在大电流限幅下运行了十几秒,变频器没有发生任何故障。
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WW.W_PLC※JS_C,OM-PL,C-技.术_网
参考文献
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
①艾默生公司EV3000系列通用变频器 艾默生网络能源有限公司
W1WW_P4LCJS_COM-PLC-技.术_网
②新型PID控制及其应用 机械工业出版社 陶永华
WWW_P※LCJS_CO※M-PLC-技-.术_网
③EC20系统手册 艾默生网络能源有限公司
WWW_PLCJS@_COM%-PLC-技.术_网
④通用变频器及其应用 机械工业出版社 韩安荣
WWW_P※LCJS_COM-PLC-)技.术_网
⑤电机拖动与控制 西安电子科技大学出版社 刘保录
plcjs.技.术_网
⑦EC20-5AM使用说明 艾默生网络能源有限公司
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PLCJS_COM-PLC-技.术_网
plcjs.技.术_网
P.L.C.技.术.网——可编程控制器技术门户
上一篇: 连轧机主传动系统下一篇: 台达机电产品在木线条砂光机上的实际应用
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行