轮转机伺服调试记录
日期:2008-4-28 9:16:00 来源:本站整理
点击: 作者:{News_Author}
点击: 作者:{News_Author}
点击【 大 中 小 】放大字体.
机器概述:
印六种颜色和上光油(6+1)。有七个 UV 灯。 大轮:由电机通过减速机(7:1)齿数是 68,驱动大轮(ф1M 990 齿)。 小轮:电机减速机(7:1)。通过同步皮带拖动各个小辊轴。 编码器安装在辊轴ф200mm。
系统设计概述:
在小轮轴驱动器上,通过建立虚轴把它的结果放到 SIMOLINK 上,前后两台伺服驱动 器共同读取位置和速度数据达到同步功能!
系统配置: 控制线是接在小驱动器侧:使用3、4、8、9、10。
3、4 ON是手动频率。3 ON是自动频率。8 ON是小伺服单独使用 小驱动:6SE7021-OEP50。 马达:1FK6083-6AF71-1EAO 大轮驱动:6ES7021-4EP50。马达:1KF7103-5AF71-1AHO
两台伺服都需要带F01!
程序实施步骤:
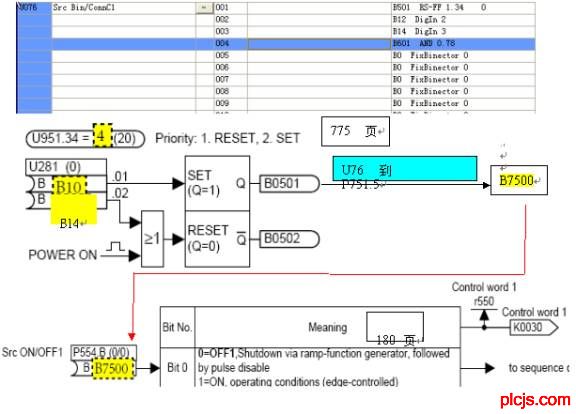
小轮伺服: 一、逻辑控制:
开机使能:动作一次使能伺服,锁定机械传动轴,防止由于张力和齿轮间隙造成反弹。 需要发送的操作位变成字 K:
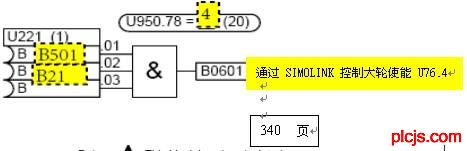
二、通道选择:
三、小轮单独使用(模切):
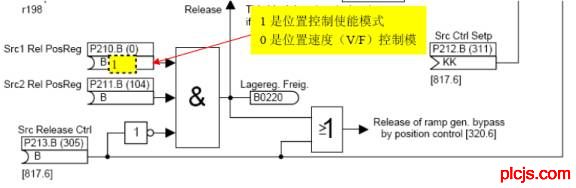
四:位置环使能:
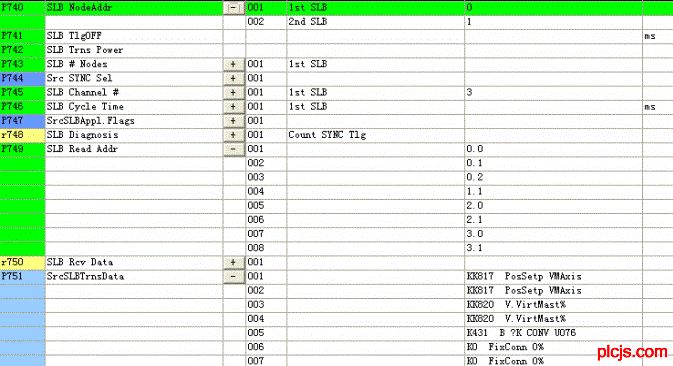
五:建立虚轴: 此功能主要是建立虚轴,使用。参看 832 页。
U681= K521
U682=4096*3000
U685=20(1000LU/S 2)
U687=4096
U953.34=4
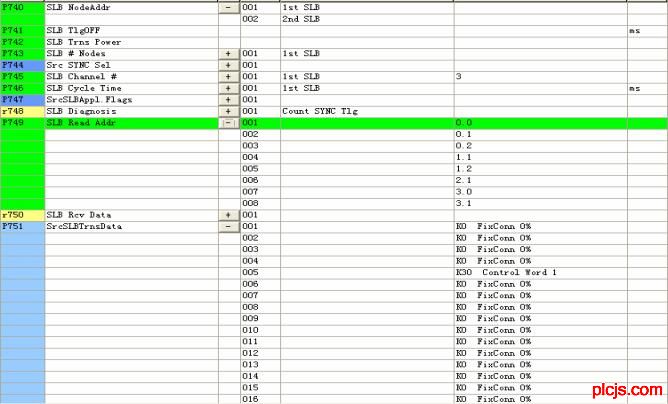
P751.1=KK817
P751.2=KK817
P751.3=KK820 。
P751.4=KK820
六:连接实轴死角补偿功能: 此功能使用效果不大,主要是用于马达启动角度的补偿。参看 833 页。
U422.1=KK7031
U422.3=KK7033
U425.1=4096
U425.2=4096
U428=204
U424=10
U953.31=4
七:连接同步功能: 主要连接虚轴和实轴处理后的参数,参看 834 页。
U600.1=K0
U600.2=KK608
U600.3=K0
U600.4=K0
U600.5=KK624
U600.6=0
U606=1
U601=4096
U607.1=204.0
U607.2=204.0
U953.33=4
U501.11=4096
U501.23=12288
U501.49=100
八:信号处理和位置控制侦察: 主要处理编码器读回的数据和设定值比较。参看 815、330、页
P172=KK302
P174=KK301
U535=KK120
U539=KK122
以下是几个参数:
P204=1
P235.1=60
P236.1=30
P240.1=0
P263.1=200.0
P264.1=-200.0
P320.1=KK75
P443.1=KK521
U710.29=1
U710.30=0
U710.31=1
U710.32=1
大轮伺服:
一、使能大伺服:

初使化:P60=2 P970=0
小轮 设置
大轮 设置:
WWW.PLCJS.COM——可编程控制器技术门户
plcjs.技.术_网
机器概述:
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
印六种颜色和上光油(6+1)。有七个 UV 灯。 大轮:由电机通过减速机(7:1)齿数是 68,驱动大轮(ф1M 990 齿)。 小轮:电机减速机(7:1)。通过同步皮带拖动各个小辊轴。 编码器安装在辊轴ф200mm。
WW.W_PLC※JS_C,OM-PL,C-技.术_网
系统设计概述:
plcjs.技.术_网
在小轮轴驱动器上,通过建立虚轴把它的结果放到 SIMOLINK 上,前后两台伺服驱动 器共同读取位置和速度数据达到同步功能!
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
系统配置: 控制线是接在小驱动器侧:使用3、4、8、9、10。
WWW.PLCJS.COM——可编程控制器技术门户
3、4 ON是手动频率。3 ON是自动频率。8 ON是小伺服单独使用 小驱动:6SE7021-OEP50。 马达:1FK6083-6AF71-1EAO 大轮驱动:6ES7021-4EP50。马达:1KF7103-5AF71-1AHO
WWW_PL※CJS_COM-PLC-技.术_网
两台伺服都需要带F01!
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
程序实施步骤:
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
小轮伺服: 一、逻辑控制:
WWW_P※LCJS_CO※M-PLC-技-.术_网
开机使能:动作一次使能伺服,锁定机械传动轴,防止由于张力和齿轮间隙造成反弹。 需要发送的操作位变成字 K:
WWW_PLCJS@_COM%-PLC-技.术_网
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
二、通道选择:
W1WW_P4LCJS_COM-PLC-技.术_网
三、小轮单独使用(模切):
WWW_PLCJS_COM-PLC-技.术_网
P.L.C.技.术.网——可编程控制器技术门户
四:位置环使能:
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
P.L.C.技.术.网——可编程控制器技术门户
五:建立虚轴: 此功能主要是建立虚轴,使用。参看 832 页。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
U681= K521
WWW_P※LCJS_CO※M-PLC-技-.术_网
U682=4096*3000
WW.W_PLC※JS_C,OM-PL,C-技.术_网
U685=20(1000LU/S 2)
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
U687=4096
P.L.C.技.术.网——可编程控制器技术门户
U953.34=4
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
P751.1=KK817
WW.W_PLCJS_COM-PLC-技.术_网
P751.2=KK817
WWW.PLCJS.COM——可编程控制器技术门户
P751.3=KK820 。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
P751.4=KK820
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
六:连接实轴死角补偿功能: 此功能使用效果不大,主要是用于马达启动角度的补偿。参看 833 页。
WWW_PLCJS@_COM%-PLC-技.术_网
U422.1=KK7031
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
U422.3=KK7033
WWW_PLCJS@_COM%-PLC-技.术_网
U425.1=4096
WWW_P※LCJS_CO※M-PLC-技-.术_网
U425.2=4096
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
U428=204
——可——编——程——控-制-器-技——术——门——户
U424=10
WWW_PLCJS@_COM%-PLC-技.术_网
U953.31=4
WWW_P※LCJS_COM-PLC-)技.术_网
七:连接同步功能: 主要连接虚轴和实轴处理后的参数,参看 834 页。
WWW_PLCJS_COM-PLC-技.术_网
U600.1=K0
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
U600.2=KK608
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
U600.3=K0
WWW_PL※CJS_COM-PLC-技.术_网
U600.4=K0
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
U600.5=KK624
plcjs.技.术_网
U600.6=0
WWcW_PLCJS_COM-PLC-技.术_网
U606=1
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
U601=4096
WWW_PLCJS_COM-PLC-技.术_网
U607.1=204.0
W1WW_P4LCJS_COM-PLC-技.术_网
U607.2=204.0
——可——编——程——控-制-器-技——术——门——户
U953.33=4
WW.W_PLC※JS_C,OM-PL,C-技.术_网
U501.11=4096
WW.W_PLC※JS_C,OM-PL,C-技.术_网
U501.23=12288
WW.W_PLC※JS_C,OM-PL,C-技.术_网
U501.49=100
WWW_PL※CJS_COM-PLC-技.术_网
八:信号处理和位置控制侦察: 主要处理编码器读回的数据和设定值比较。参看 815、330、页
plcjs.技.术_网
P172=KK302
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
P174=KK301
plcjs.技.术_网
U535=KK120
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
U539=KK122
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
以下是几个参数:
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
P204=1
WW.W_PLCJS_COM-PLC-技.术_网
P235.1=60
WW.W_PLC※JS_C,OM-PL,C-技.术_网
P236.1=30
WWW_PLC※JS_COM-PmLC-技.术_网
P240.1=0
WWW.PLCJS.COM——可编程控制器技术门户
P263.1=200.0
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
P264.1=-200.0
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
P320.1=KK75
WWW_P※LCJS_CO※M-PLC-技-.术_网
P443.1=KK521
W1WW_P4LCJS_COM-PLC-技.术_网
U710.29=1
——可——编——程——控-制-器-技——术——门——户
U710.30=0
WWW.PLCJS.COM——可编程控制器技术门户
U710.31=1
WWW_P※LCJS_COM-PLC-)技.术_网
U710.32=1
——可——编——程——控-制-器-技——术——门——户
大轮伺服:
WW.W_PLCJS_COM-PLC-技.术_网
一、使能大伺服:
W1WW_P4LCJS_COM-PLC-技.术_网
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
初使化:P60=2 P970=0
plcjs.技.术_网
小轮 设置
WWW_PLC※JS_COM-PmLC-技.术_网
——可——编——程——控-制-器-技——术——门——户
大轮 设置:
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PL※CJS_COM-PLC-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
上一篇: MM4入门指南下一篇: 利用WINCC归档功能进行工艺记录和配方处理
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行