三菱PLC增量方式凸轮控制指令INCD
日期:2009-3-5 23:24:36 来源:网络
点击: 作者:
点击: 作者:
点击【 大 中 小 】放大字体.
三菱PLC增量方式凸轮控制指令INCD的编程方式与动作原理如下图所示:
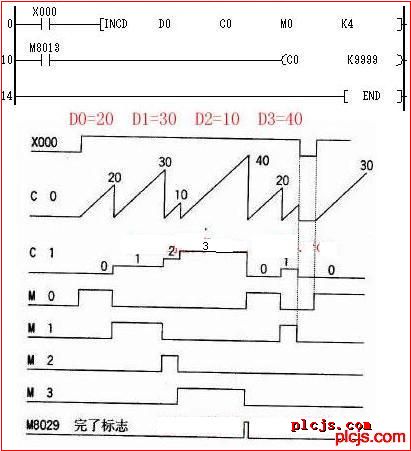
*D0:源寄存器起始地址,可以是T,C,D或位元件组合如K4XO
*C0:只能是计数器C
*M0:目标位元件起始地址,可以是Y,M,S
*K4:指定参预运算的元件范围,只能是数值,其指定范围为1<=n<=64
解释:
1、计数器C0达到按D0---D3设定值时,按顺序自动复位
2、工作计数器C1计数其复位的次数
3、对应工作计数器C1的当前值,M0---M3按顺序工作
4、n指定的最后工作结束时,标志M8029动作,再次返回进行同样的工作
5、X000置于OFF时,C0,C1被清除,M0---M3也断开。再次将X000置于ON时,从初始开始工作。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WWW_PLCJS@_COM%-PLC-技.术_网
*D0:源寄存器起始地址,可以是T,C,D或位元件组合如K4XO
WWW_PLC※JS_COM-PmLC-技.术_网
*C0:只能是计数器C
WWW_PLCJS_COM-PLC-技.术_网
*M0:目标位元件起始地址,可以是Y,M,S
WWW_PLCJS@_COM%-PLC-技.术_网
*K4:指定参预运算的元件范围,只能是数值,其指定范围为1<=n<=64
WWW_PL※CJS_COM-PLC-技.术_网
解释:
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
1、计数器C0达到按D0---D3设定值时,按顺序自动复位
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
2、工作计数器C1计数其复位的次数
W1WW_P4LCJS_COM-PLC-技.术_网
3、对应工作计数器C1的当前值,M0---M3按顺序工作
W1WW_P4LCJS_COM-PLC-技.术_网
4、n指定的最后工作结束时,标志M8029动作,再次返回进行同样的工作
WW.W_PLCJS_COM-PLC-技.术_网
5、X000置于OFF时,C0,C1被清除,M0---M3也断开。再次将X000置于ON时,从初始开始工作。
P.L.C.技.术.网——可编程控制器技术门户
上一篇: 三菱FX系列PLCBIN开方运算指令SQR下一篇: 三菱PLC绝对方式凸轮控制指令ABSD
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行