PLC程序设计的功能表图方法
日期:2008-2-20 16:48:00 来源:本站整理
点击: 作者:gjbgjb
点击: 作者:gjbgjb
点击【 大 中 小 】放大字体.
二.
步4、步6、步8这三步同时变为活动步。同时步3变为静步。为了强调转移的同步实现。水平连线用双线表示。步4、步6、步8被同时激活后,每个序列中活动步的进展将是独立的。在表示同步的水平双线之上。只允许有一个转移符号。
并发序列的结束称为合并,见图5-8(b)。在表示同步的水平双线之下,只允许有一个转移符号。当直接连在双线上的所有前级步都处于活动状态,并且转移条件e=1时,才会发生步2、步5、步7到步9的进展,即步2、步5、步7同时变为静步,而步9变为活动步。
并发序列用来表示系统的几个同时工作的独立部分的工作情况。
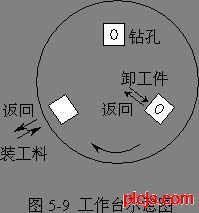
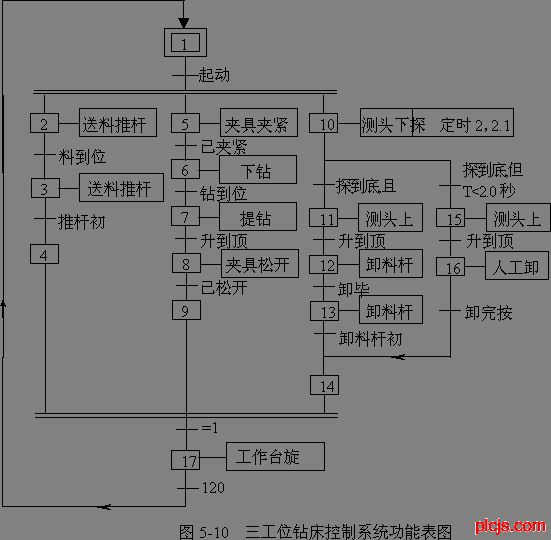
例如:图5-9是一个三工位钻床的工作台示意图。图5-10是该工作台控制系统的功能表图。步1是初始步,按下起动按钮后,三个工位同时工作。一个工位将工件送到圆形工作台上,然后送料推杆退回。另一个工位将工件夹紧并钻孔,钻完后钻头向上返回初始位置并松开工件。在第三个工位用深度计测量加工的孔
是否合格:如果合格,则测量头上升,并自动卸下加工好的工件。然后卸料杆返回;如果不合格,测量头返回后人工取走次品,并用按钮发出人工卸料完成的信号。三个工位的操作都完成以后,工作台顺时针旋转120℃,最后系统返回初始
步。
起始步1的状态用M15表示,是用步2~步5的静步状态相与作为它的驱动条件。
M15支路在单一顺序控制中无多大意义,可省。但在选择/并发顺序中有较明确的意义,可使程序结构清晰。
再如三位工位钻床的PLC控制原理图、地址分配见图5-13:
假设每步的状态用M位表示,例如M01、M09、M10、M17分别表示1、9、10、17步的状态。对应的梯形图如图5-14:
第一节. 概述
功能表图 ( Function Chart ) 亦称顺序功能表图 ( Sequence Function Chart ),简称SFC。
在前面我们已经系统地介绍了梯形图设计方法,这种方法绝大多数是采用经验设计方法,是从传统的继电器逻辑设计方法继承而来,它的基本设计思想是:被控制过程由若干个状态所组成,每个状态都由输入的某些命令信号建立,辅助继电器用于区分状态且构成执行元件的输入变量,而辅助继电器的状态由输入的命令信号控制,正确找出辅助继电器、命令信号及执行元件之间的逻辑关系,也就基本完成了程序设计任务。
经验法仅适用于简单的单一顺序问题的程序设计,且设计无一定的规律可循,对稍复杂的程序设计起来显得较为困难,而对具有并发顺序选择顺序的问题就更显得无能为力,故有必要寻求一种能解决更广泛顺序类型问题的程序设计方法。
功能表图是一种能很好解决上述问题的程序设计方法,它是描述控制系统的控制过程、功能、特性的一种图形,它最初很象一种工艺性的流程图,它并不涉及所描述的控制功能之具体技术,是一种通用的技术语言。这种设计方法很容易被初学者接受,对有一定经验的技术人员而言也会提高设计效率,有资料称这种设计方法可减少2/3的设计时间,且用此法设计出的程序调试、修改、阅读也很容易。
这种设计方法是在80年代初由法国科技人员最先提出的,因为它有许多优越性,很快得到了推广,法、德等国并对此推出了相关的国家标准,IEC了于88年公布了类似的国际标准,我国也已在86年颁布了功能表图的国标。
功能表图法在PLC程设中有两种用法:
1) 直接根据功能表图的原理研制PLC,即将功能表图作为一种编程语言直接使用,目前已有此类产品,多数应用在大、中型PLC上,其编程主要通过CRT终端,直接使用功能表图输入控制要求。
2) 用功能表图说明PLC所要完成的控制功能,然后再据此找出逻辑关系并画出梯形图。这种应用法较多,本节主要讨论这种方法。
WW.W_PLCJS_COM-PLC-技.术_网
在前面我们已经系统地介绍了梯形图设计方法,这种方法绝大多数是采用经验设计方法,是从传统的继电器逻辑设计方法继承而来,它的基本设计思想是:被控制过程由若干个状态所组成,每个状态都由输入的某些命令信号建立,辅助继电器用于区分状态且构成执行元件的输入变量,而辅助继电器的状态由输入的命令信号控制,正确找出辅助继电器、命令信号及执行元件之间的逻辑关系,也就基本完成了程序设计任务。
——可——编——程——控-制-器-技——术——门——户
经验法仅适用于简单的单一顺序问题的程序设计,且设计无一定的规律可循,对稍复杂的程序设计起来显得较为困难,而对具有并发顺序选择顺序的问题就更显得无能为力,故有必要寻求一种能解决更广泛顺序类型问题的程序设计方法。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
功能表图是一种能很好解决上述问题的程序设计方法,它是描述控制系统的控制过程、功能、特性的一种图形,它最初很象一种工艺性的流程图,它并不涉及所描述的控制功能之具体技术,是一种通用的技术语言。这种设计方法很容易被初学者接受,对有一定经验的技术人员而言也会提高设计效率,有资料称这种设计方法可减少2/3的设计时间,且用此法设计出的程序调试、修改、阅读也很容易。
WW.W_PLC※JS_C,OM-PL,C-技.术_网
这种设计方法是在80年代初由法国科技人员最先提出的,因为它有许多优越性,很快得到了推广,法、德等国并对此推出了相关的国家标准,IEC了于88年公布了类似的国际标准,我国也已在86年颁布了功能表图的国标。
——可——编——程——控-制-器-技——术——门——户
功能表图法在PLC程设中有两种用法:
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
1) 直接根据功能表图的原理研制PLC,即将功能表图作为一种编程语言直接使用,目前已有此类产品,多数应用在大、中型PLC上,其编程主要通过CRT终端,直接使用功能表图输入控制要求。
WWW.PLCJS.COM——可编程控制器技术门户
2) 用功能表图说明PLC所要完成的控制功能,然后再据此找出逻辑关系并画出梯形图。这种应用法较多,本节主要讨论这种方法。
WWW_PL※CJS_COM-PLC-技.术_网
第二节. 功能表图的基本概念
功能表图是一种描述顺序控制系统过程、功能和特性的图形表示方法。主要由步、转移,有向线等元素组成。
plcjs.技.术_网
一. 步
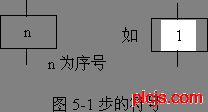
步是控制系统中一相对不变的状态,在功能表图中,步通常表示某个或某些执行元件的状态,其符号见图5-1。步又分成起始步、动步、静步。
 1.起始步:
1.起始步:
起始步对应于控制系统的初始状态,是系统运行的起点。一个控制系统至少要有1个起始步,起始步的符号见图5-2
2.动步、静步
 静步是指控制系统当前没有运行的步。
静步是指控制系统当前没有运行的步。
动步是指控制系统当前正在运行的步。
动步用1个小黑点放在步的方框图中表示,见图5-3。
动步、静步是系统分析时用的术语,平时进行程设时并不用。
3.步对应的动作
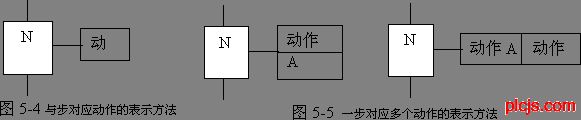
步是一个稳定的状态,表示过程中的一个动作。在该步的右边用1个矩形框表示,见图5-4,当一个步对应多个动作时,可用图5-5表示。
plcjs.技.术_网
1.起始步:WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
起始步对应于控制系统的初始状态,是系统运行的起点。一个控制系统至少要有1个起始步,起始步的符号见图5-2
WWW_PLCJS@_COM%-PLC-技.术_网
2.动步、静步
plcjs.技.术_网
静步是指控制系统当前没有运行的步。WWW_PLCJS@_COM%-PLC-技.术_网
动步是指控制系统当前正在运行的步。
WWW_PLCJS_COM-PLC-技.术_网
动步用1个小黑点放在步的方框图中表示,见图5-3。
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
动步、静步是系统分析时用的术语,平时进行程设时并不用。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
P.L.C.技.术.网——可编程控制器技术门户
3.步对应的动作
WWW_PLCJS_COM-PLC-技.术_网
步是一个稳定的状态,表示过程中的一个动作。在该步的右边用1个矩形框表示,见图5-4,当一个步对应多个动作时,可用图5-5表示。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
 |
WWW_PLC※JS_COM-PmLC-技.术_网
二.  有向线和转移
有向线和转移
1. 有向线
在控制系统中动步是变化的,会向前转移的,转移的方向是按有向线规定的路线进行,习惯上是从上到下、由左至右;如不是上述方向,应在有向线上用箭头标明转移方向。
必要时为了便于理解也可加箭头。
2. 转移条件
动步的转移是有条件的,转移条件在有向线上划一短横线表示,见图5-6,横线旁边注明转移条件。
若同一级步都是动步,且该步后的转移条件满足,则实现转移,即后一静步变为动步,原来的动步变为静步。
plcjs.技.术_网
在控制系统中动步是变化的,会向前转移的,转移的方向是按有向线规定的路线进行,习惯上是从上到下、由左至右;如不是上述方向,应在有向线上用箭头标明转移方向。
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
必要时为了便于理解也可加箭头。
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
2. 转移条件
WW.W_PLC※JS_C,OM-PL,C-技.术_网
动步的转移是有条件的,转移条件在有向线上划一短横线表示,见图5-6,横线旁边注明转移条件。
WW.W_PLCJS_COM-PLC-技.术_网
若同一级步都是动步,且该步后的转移条件满足,则实现转移,即后一静步变为动步,原来的动步变为静步。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
三. 功能表图的构成规则
画控制系统功能表图必须遵循以下规则:
1) 步与步不能直接相连,必须用转移分开。
2) 转移与转移不能相连,必须用步分开。
3) 步与步之间的连接采用有向线,从上→下或由左→右画时,可以省略箭头。当有向线从下→上或由右→左时,必须画箭头,以明示方向。
4) 至少有1个起始步。
至少有1个起始步。
plcjs.技.术_网
1) 步与步不能直接相连,必须用转移分开。
WWW_PLCJS@_COM%-PLC-技.术_网
2) 转移与转移不能相连,必须用步分开。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
3) 步与步之间的连接采用有向线,从上→下或由左→右画时,可以省略箭头。当有向线从下→上或由右→左时,必须画箭头,以明示方向。
WWW_P※LCJS_COM-PLC-)技.术_网
4)
至少有1个起始步。WWW_P※LCJS_CO※M-PLC-技-.术_网
四. 功能表图的基本形式
1. 单一序列
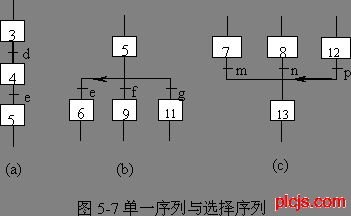
单一序列由一系列前后相继激活的步组成,每步的后面紧接一个转移,每个转移后面只有一个步,见图5-7(a)。
2. 选择序列
选择序列的开始称为分支,见
图5-68(b),转移符号只能标在水平
连线之下。如果步5是活动的,并且转移条件 e=1,则发生由步5→步6的进展。
如果步5是活动的,并且f=1,则发生由步5→步9的进展。一般只允许同时选择一个序列。
选择序列的结束称为合并,见图5-7(c)。几个选择序列合并到一个公共序列时,转移符号和需要重新组合的序列数量相同,转移符号只允许标在水平连线之上。如果步7是活动步,并且转移条件m=1,则发生由步7→步13的进展。如果步8是活动步,并且n =1,则发生由步8→步13的进展。
3. 并发序列
并发序列的开始称为分支,见图5-8(a)。当转移的实现导致几个序列同时激活时,这些序列称为并发序列。当步3是活动的,并且转移条件d=1时,
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
单一序列由一系列前后相继激活的步组成,每步的后面紧接一个转移,每个转移后面只有一个步,见图5-7(a)。
——可——编——程——控-制-器-技——术——门——户
2. 选择序列
WWW_P※LCJS_COM-PLC-)技.术_网
选择序列的开始称为分支,见
WWW_P※LCJS_COM-PLC-)技.术_网
图5-68(b),转移符号只能标在水平
WWW_P※LCJS_CO※M-PLC-技-.术_网
连线之下。如果步5是活动的,并且转移条件 e=1,则发生由步5→步6的进展。
P.L.C.技.术.网——可编程控制器技术门户
如果步5是活动的,并且f=1,则发生由步5→步9的进展。一般只允许同时选择一个序列。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
选择序列的结束称为合并,见图5-7(c)。几个选择序列合并到一个公共序列时,转移符号和需要重新组合的序列数量相同,转移符号只允许标在水平连线之上。如果步7是活动步,并且转移条件m=1,则发生由步7→步13的进展。如果步8是活动步,并且n =1,则发生由步8→步13的进展。
WWcW_PLCJS_COM-PLC-技.术_网
3. 并发序列
WWW_PLCJS_COM-PLC-技.术_网
并发序列的开始称为分支,见图5-8(a)。当转移的实现导致几个序列同时激活时,这些序列称为并发序列。当步3是活动的,并且转移条件d=1时,
plcjs.技.术_网
 |
W1WW_P4LCJS_COM-PLC-技.术_网
步4、步6、步8这三步同时变为活动步。同时步3变为静步。为了强调转移的同步实现。水平连线用双线表示。步4、步6、步8被同时激活后,每个序列中活动步的进展将是独立的。在表示同步的水平双线之上。只允许有一个转移符号。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
并发序列的结束称为合并,见图5-8(b)。在表示同步的水平双线之下,只允许有一个转移符号。当直接连在双线上的所有前级步都处于活动状态,并且转移条件e=1时,才会发生步2、步5、步7到步9的进展,即步2、步5、步7同时变为静步,而步9变为活动步。
WWW_PLCJS_COM-PLC-技.术_网
并发序列用来表示系统的几个同时工作的独立部分的工作情况。
WWW_PLCJS@_COM%-PLC-技.术_网
例如:图5-9是一个三工位钻床的工作台示意图。图5-10是该工作台控制系统的功能表图。步1是初始步,按下起动按钮后,三个工位同时工作。一个工位将工件送到圆形工作台上,然后送料推杆退回。另一个工位将工件夹紧并钻孔,钻完后钻头向上返回初始位置并松开工件。在第三个工位用深度计测量加工的孔
——可——编——程——控-制-器-技——术——门——户
是否合格:如果合格,则测量头上升,并自动卸下加工好的工件。然后卸料杆返回;如果不合格,测量头返回后人工取走次品,并用按钮发出人工卸料完成的信号。三个工位的操作都完成以后,工作台顺时针旋转120℃,最后系统返回初始
WWW_PLC※JS_COM-PmLC-技.术_网
步。
步4、步9、步14并不完成什么动作,是为同时结束三个并发步而设置的等待步。图5-10中水平双线之下的转移条件“=1”表示转移条件总是满足的,即只要步4、步9、步14都是活动的,就会发生步4、步9、步14到步17的转移,步4、步9、步14变为静步,而步17变为活动步。
WWW_PLC※JS_COM-PmLC-技.术_网
 |
WW.W_PLC※JS_C,OM-PL,C-技.术_网
第三节. 用梯形图实现功能表图的程序设计
一. 步的进入
除起始步外,每步的进入用该步前的转移条件和上一步的状态相与作为启动条件。
起始步一般用其它所有步的静步状态相与作为它的驱动条件。
WWW_PL※CJS_COM-PLC-技.术_网
起始步一般用其它所有步的静步状态相与作为它的驱动条件。
plcjs.技.术_网
二. 步的退出
用后面1步的状态作为本步的退出条件
注意:并发序列步的退出。并发序列退出进入后一步时,必须将所有并发顺序支路最后一步的状态相与后作为下一步进入的条件。
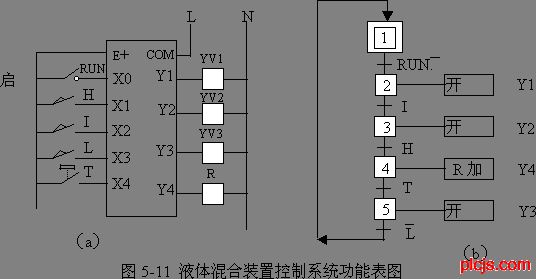 例如:¤4例6中讲述的液体混合装置一例,其PLC控制原理图、功能表图如图5-11(a)、(b)。控制程序梯形图如图5-12。
例如:¤4例6中讲述的液体混合装置一例,其PLC控制原理图、功能表图如图5-11(a)、(b)。控制程序梯形图如图5-12。
P.L.C.技.术.网——可编程控制器技术门户
注意:并发序列步的退出。并发序列退出进入后一步时,必须将所有并发顺序支路最后一步的状态相与后作为下一步进入的条件。
——可——编——程——控-制-器-技——术——门——户
例如:¤4例6中讲述的液体混合装置一例,其PLC控制原理图、功能表图如图5-11(a)、(b)。控制程序梯形图如图5-12。WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
 |
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
起始步1的状态用M15表示,是用步2~步5的静步状态相与作为它的驱动条件。
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
M15支路在单一顺序控制中无多大意义,可省。但在选择/并发顺序中有较明确的意义,可使程序结构清晰。
WW.W_PLCJS_COM-PLC-技.术_网
再如三位工位钻床的PLC控制原理图、地址分配见图5-13:
WW.W_PLC※JS_C,OM-PL,C-技.术_网
假设每步的状态用M位表示,例如M01、M09、M10、M17分别表示1、9、10、17步的状态。对应的梯形图如图5-14:
WWW_PL※CJS_COM-PLC-技.术_网
本新闻共2页,当前在第1页1 2
WWW.PLCJS.COM——可编程控制器技术门户
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行