台达运动控制型PLC的应用技术
日期:2008-8-1 0:27:19 来源:本站整理
点击: 作者:
点击: 作者:
点击【 大 中 小 】放大字体.
摘 要:本文简述台达DVP20PM运动控制型PLC的硬件及软件结构,并介绍在应用中的方法及特点。
关键词:PLC 运动控制 逻辑控制 数控系统 CAM 插补运算
1 引言
随着自动化设备对控制的高精度、高响应性需求的不断增加,自动化控制技术不断提高,精确的高速定位控制得到广泛应用,PLC这一工业控制产品也从早期的逻辑控制领域不断扩展到运动控制领域,实现了以往PLC无法完成的运动控制功能。
在运动控制中大多数采用我们熟悉的数控系统或者是计算机运动板卡来完成,虽然作为专门的产品能够实现复杂的运动轨迹控制,但同时要完成一些逻辑动作的控制就不如PLC灵活方便。台达DVP20PM系列PLC高速定位、双轴线性及圆弧插补多功能可编程控制器,结合了PLC逻辑动作控制和数控系统运动控制的各自优点,在功能上满足双轴插补的高速定位需求。
2 台达运动控制型PLC硬件结构
DVP20PM是台达运动控制型PLC。DVP20PM通过前后两个扩展口既可作为PLC主机执行也可作为EH2型主机的扩展模块使用,具有X0-X7、 Y0-Y7数字量输入输出各八点,并配置了手摇轮、零点信号、原点信号、极限信号、启动、停止等各种信号接口满足应用需求。
DVP20PM主机包含64K超大程序容量内存(Flash),可支持100段运动程序,脉冲输出最高可达500KHz,并具备电子原点返回模式,支持PLC顺序语言及定位语言(G 码与M码),下面先由硬件部分简单介绍20PM 组成。
2.1 电源
DVP20PM电源规格参见表1。
表1 电源规格
|
项目 |
内容 |
|
电源电压 |
100~240VAC(-15%~10%), 50/60Hz ± 5% |
|
电源保险丝容量 |
2A/250VAC |
|
消耗电力 |
60 VA |
|
DC24V供应电流 |
500 mA |
|
电源保护 |
DC24V输出具短路保护 |
|
突波电压耐受量 |
1500VAC(Primary-secondary),1500VAC(Primary-PE),500VAC(Secondary-PE) |
|
绝缘阻抗 |
5 MΩ以上(所有输出/入点对地之间 500VDC) |
|
噪声免疫力 |
ESD: 8KV Air Discharge,EFT: Power Line: 2KV, Digital I/O: 1KV, Analog & Communication I/O: 250V |
|
接地 |
接地配线之线径不得小于电源端L, N之线径(多台20PM同时使用时,请务必单点接地) |
|
操作/储存环境 |
操作:0°C~55°C(温度),50~95%(湿度),污染等级 2;储存:-25°C ~70°C(温度),5~95%(湿度) |
|
耐振动/冲击 |
国际标准规范 IEC61131-2, IEC 68-2-6(TEST Fc)/IEC61131-2 & IEC 68-2-27(TEST Ea) |
|
重量(约g) |
478/688 |
2.2I/O点规格
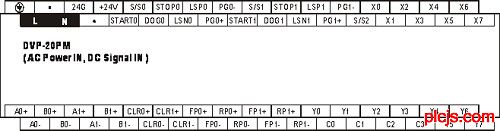
参见图1,DVP20PM提供的数字量输入输出点规格与台达通用PLC规格基本相同,输入点支持SINK(漏极)和SOURCE(源极)两种方式,输出点也有继电器输出和晶体管输出可选。
WWW_PL※CJS_COM-PLC-技.术_网
WW.W_PLC※JS_C,OM-PL,C-技.术_网
plcjs.技.术_网
图1
需要提到的是其在运动控制中的特殊输入输出点,简述如下:
START0、START1:启动输入
STOP0、STOP1:停止输入
LSP0/LSN0、LSP1/LSN1:右极限输入/左极限输入
A0+、A0-、A1+、A1-:手摇轮A相脉波输入+,-(差动信号输入)
B0+、B0-、B1+、B1-:手摇轮B相脉波输入+,-(差动信号输入)
PG0+、PG0-、PG1+、PG1-:零点讯号输入+,- (差动信号输入)
DOG0、DOG1:原点回归的近点信号输入或多段运动的启动信号
CLR0+、CLR0-、CLR1+、CLR1-:清除信号(Servo驱动器内部偏差计数器清除信号)
FP0+、FP0-、FP1+、FP1-:脉冲输出端口
RP0+、RP0-、RP1+、RP1-:脉冲输出端口
(注:0表示第一轴,1表示第二轴,如START0表示启动第一轴,START1表示启动第二轴,其他信号依次类推)
从端子分布可以看到,除了常用的极限和启动停止信号外,配置了过零脉冲PG和手摇轮功能输入端,手摇轮是机床应用中常用而必备功能,而利用过零信号在精确控制场合往往会用到,当然更不用说定位控制中都会用到的DOG原点信号。
2.3配线规格
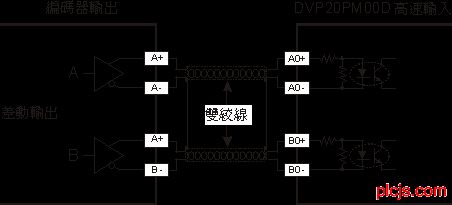
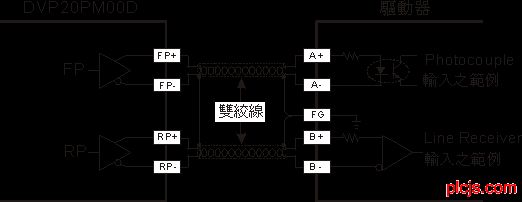
一般I/O点配线就不再赘言了,可以关注一下PLC比较少用到的差分输入输出方式,在信号中有一部分是这样的,一定要注意否则将不能正确完成,参见图2、图3。
W1WW_P4LCJS_COM-PLC-技.术_网
WW.W_PLC※JS_C,OM-PL,C-技.术_网
plcjs.技.术_网
图2差分输入配线示意图
WWW_PL※CJS_COM-PLC-技.术_网
WWW_P※LCJS_COM-PLC-)技.术_网
图3差分输出配线示意图
3 台达运动控制型PLC软件结构
3.1 DVP20PM程序结构
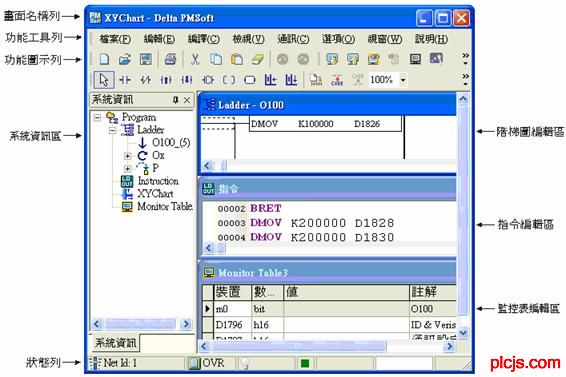
由于20PM主机结合了PLC顺序逻辑控制及双轴插补定位控制的功能,因此在程序架构上主要分为O100主程序、Ox运动子程序及Pn子程序等三大类,结合了基本指令、应用指令、运动指令及G Code指令,使程序设计更多元化,结构更清晰;程序采用PMSOFT软件进行编辑,参见图4。
WW.W_PLCJS_COM-PLC-技.术_网
WW.W_PLCJS_COM-PLC-技.术_网
图4 程序设计界面
(1)主程序。主程序以O100作为起始标记,M102作为结束标记,是PLC顺序控制程序,主要为控制主机动作执行,在O100主程序区域中,可以使用基本指令及应用指令,或在程序中启动Ox0~Ox99运动子程序及调用Pn子程序。主要提供主控制程序的建立,以及运动子程序的设定及启动控制。
(3)运动子程序。Ox0~Ox99运动子程序为运动控制程序,主要为控制20PM系列主机进行X-Y轴双轴运动之子程序,于Ox0~Ox99运动子程序区段中,有支持基本指令、应用指令、运动指令及G码指令,并在程序中可规划呼叫Pn指针子程序,通过PLC提供的内部特D特M进行子程序的控制。主要提供运动子程序的建立,以及运动子程序的运动控制,在架构上可算是20PM的运动指令及G码指令规划区域。
(4)子程序。这里所说的子程序是指以Pn开头的一般用子程序,主要是被O100主程序及Ox运动子程序调用的子程序。如在O100主程序调用Pn指针,则Pn 指针子程序支持基本指令及应用指令;若在Ox0 ~ Ox99运动子程序中调用Pn指针时,则Pn指针子程序区段可支持基本指令、应用指令、运动指令及G码指令。
3.2PMSOFT软件介绍
与台达PLC的WPLSoft软件相似,DVP20PM的编程软件PMSOFT按照IEC61131标准设计,具有梯形图和语句表两种编程方式,且具有G 码汇入、错误提示、区段注释、装置注释、标尺、完善的监控窗口、运动指令追踪等便利工具提供给用户,特别值得一提的是该软件具有运动轨迹仿真功能,当您编辑好程序后可利用此功能对加工轨迹进行模拟演示,参见图5。
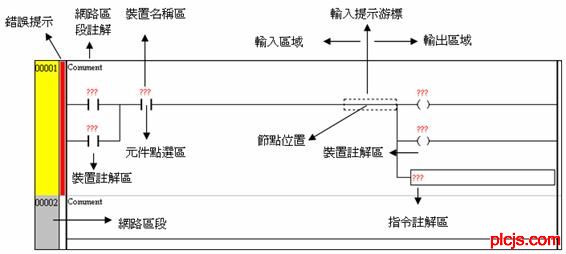
为方便切换阶梯窗口,只要点选系统信息列中的树枝状对应的程序编号,自动切换对应的程序编辑窗口,在PMSoft编辑环境中同时只能有一个阶梯图窗口,这是为了在庞大复杂程序中找寻程序方便,同时将主程序、运动子程序、一般子程序这三种程序模块化处理,O100主程序只有一个编辑窗口,Oxn运动程序有 100个编辑窗口,Pm子程序有256个编辑窗口,总共有357个窗口,每个窗口未编辑都有10 network。程序编辑由网络区段组成,每个网络区段是由输入与输出编辑区域所组成,在编辑过程中,自动产生逻辑结构正确的阶梯图,使用者无须再做额外补线的动作,网络区段编辑并具有错误提示功能。
P.L.C.技.术.网——可编程控制器技术门户
WWW_PLCJS_COM-PLC-技.术_网
图5 梯形图编程界面
本新闻共2页,当前在第1页1 2
WW.W_PLCJS_COM-PLC-技.术_网
上一篇: 三线式传感器与台达PLC配线图下一篇: 没有了
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行