步进系统的运行精度问题
日期:2008-4-3 16:13:47 来源:本站整理
点击: 作者:潘亮
点击: 作者:潘亮
点击【 大 中 小 】放大字体.
一个常见的误区就是把系统的精度误差全部归结为电机的问题。从步进电机的角度来说,需要满足一些公差标准,包括机械公差和电气公差。相绕组电感的不均衡是重要因素,其他一些原因包括极靴、转子的不对准,定转子间气隙的不均匀,定转子齿槽关系,以及转矩脉动等。达到并持续控制这些参数并不是非常困难的事。
我们知道,电机定子绕组的电感量正比于绕组匝数的平方,只要采用恰当的绕制工艺就能保证相电感间的一致性。很多步进电机制造商已经使用自动绕线设备来保证这种一致性。当然,转子磁性材料也应具备良好的一致性从而保证电机各相电感的一致。其他一些规格指标则与机械有关。只要制造商使用可靠的、高品质的部件及优良的工艺控制来保证定转子均匀的磨削量,就能获得满意的精度。正如Lin Engineering 公司的Belal Azim所说,由于保证了两相双极性步进电机相电感间的误差在±5%以内,因此0.9度的步进电机在使用64微步驱动模式下,定位误差可以达到±1.5弧分,包括精确性和准确性。满足了以上条件,步进电机就可以完全达到指标要求。
剩下的任务就是让驱动器/控制器告诉步进电机应该运动到哪儿和如何运动,而且不能由于驱动器自身精度不高而降低了电机的精度。一个细分驱动器通过给电机绕组提供特定的激磁电流,告诉电机需要运行多少个微步。步进电机运行在整步模式时,精度最高,因为刚好与电机的机械设计特点相吻合。此时定转子齿正好完全对齐,且绕组中流过的电流最大。随着细分数的增加,步矩角相应减小,此时越来越难以保证定位的准确了。
获得最平稳运行性能及精确定位的最终解决方案就是正获得最平稳运行性能及精确定位的最终解决方案就是正确的匹配电机及驱动器。当前最流行的做法就是把驱动器的输出电流设计成用户可调,有些驱动器可以通过可调电位器(adjustable trim pot)改变输出电流波形,有些可调节增益,还有一些可以通过图形用户界面下载特定的正弦表来适配电机特性。可调电位器允许用户手动调整驱动器输出电流来匹配电机特性而无需了解电机和驱动器的内部技术。然而,对希望获得最佳匹配性能的用户来说这些方法仍有缺陷。
典型的细分模式包括2、4、8、16、32、64、128及256微步;提高细分数也就相应提高了单步精度(将整步按细分数等分来提高精度)。例如,一台0.9度的步进电机如果用64细分的驱动模式,步矩角可以达到0.014度。当然,驱动器也必须按照细分规律提供给电机精确的电流值。
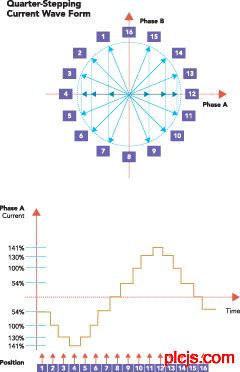
图例为4细分驱动模式下电机各相空间矢量图以及相电流随时间变化的示意图,可以直观地表示出驱动器每微步必须给出的电机相电流的大小和方向。从驱动器的角度来说,输出电流的主要部件是集成驱动芯片。驱动器的性能由芯片的设计决定。其他如选用的MOSFET、电阻电容、电路布线、相应的固件(软件)以及不合理的散热方式等也会影响其性能。因此即使驱动控制芯片能给出平滑且精确的正弦电流波形,仍然不能保证获得最优的精度。
在相绕组空间示意图中的位置12处,A相和B相的座标百分值是(100,0)。驱动器输出100%的电流给A相,而B相电流为0%。当电机运动到位置13时,座标变成(92,38),此时驱动器输出满电流的92%给A相而B相得到38%。按照这样的方式对每一步分析就会知道A相和B相电流是两个互差90度的正弦波。
1. 选择合适的电机(基于对速度和转矩的要求)。
2. 确认电机技术指标中各相电感之间误差在±5%以内。
3. 选择合适的驱动器。如果可能的话,获得驱动器输出的电流波形图。
4. 确认驱动器上有提高运行平稳性的功能或者选项,如调节续流阻尼深度(慢速或者快速电流衰减)或可调整电流波形的电位器。
5. 根据驱动器特性匹配电机电感量。通常说来,高电感量电机低速性能较好,但是需要驱动器具备高电流阻尼(快速续流),能让电流在续流期间快速下降。阻尼有助于电感的快速放电。低电感量电机高速性能好,如果驱动器能提供较低的电流阻尼(慢速续流),那么这些电机将呈现出良好的工作特性,因为他们在电感能量泄放过程中无需特别的阻尼帮助。对于一些电感量中等的电机来说,可以选择具备混合续流能力的驱动器。
如果我们谈到运动系统的精度,就会发现许多因素都对其有影响。考虑系统的精度时,工程师必须知道如何让步进电机、驱动器或控制器协调配合来获得理想的运行精度。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
一个常见的误区就是把系统的精度误差全部归结为电机的问题。从步进电机的角度来说,需要满足一些公差标准,包括机械公差和电气公差。相绕组电感的不均衡是重要因素,其他一些原因包括极靴、转子的不对准,定转子间气隙的不均匀,定转子齿槽关系,以及转矩脉动等。达到并持续控制这些参数并不是非常困难的事。
WWW_PLCJS@_COM%-PLC-技.术_网
我们知道,电机定子绕组的电感量正比于绕组匝数的平方,只要采用恰当的绕制工艺就能保证相电感间的一致性。很多步进电机制造商已经使用自动绕线设备来保证这种一致性。当然,转子磁性材料也应具备良好的一致性从而保证电机各相电感的一致。其他一些规格指标则与机械有关。只要制造商使用可靠的、高品质的部件及优良的工艺控制来保证定转子均匀的磨削量,就能获得满意的精度。正如Lin Engineering 公司的Belal Azim所说,由于保证了两相双极性步进电机相电感间的误差在±5%以内,因此0.9度的步进电机在使用64微步驱动模式下,定位误差可以达到±1.5弧分,包括精确性和准确性。满足了以上条件,步进电机就可以完全达到指标要求。
WWW_PLC※JS_COM-PmLC-技.术_网
剩下的任务就是让驱动器/控制器告诉步进电机应该运动到哪儿和如何运动,而且不能由于驱动器自身精度不高而降低了电机的精度。一个细分驱动器通过给电机绕组提供特定的激磁电流,告诉电机需要运行多少个微步。步进电机运行在整步模式时,精度最高,因为刚好与电机的机械设计特点相吻合。此时定转子齿正好完全对齐,且绕组中流过的电流最大。随着细分数的增加,步矩角相应减小,此时越来越难以保证定位的准确了。
WWW_PLCJS_COM-PLC-技.术_网
WWW_PLCJS@_COM%-PLC-技.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
每台步进电机都有自己特定的性能指标,很多指标都是根据实际应用要求设计的。为低速使用设计的电机往往电感量比较大,反之为高速设计电机的电感量比较小。为了满足不同的运动规律,步进电机设计工程师需要调整线圈中绕组的设计,以满足和速度、转矩、电流、电阻以及电感相关的数学公式。因此,同一台驱动器匹配不同电机时呈现出不同的运行性能,同样,一台电机匹配不同的驱动器时转矩特性也不同。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
获得最平稳运行性能及精确定位的最终解决方案就是正获得最平稳运行性能及精确定位的最终解决方案就是正确的匹配电机及驱动器。当前最流行的做法就是把驱动器的输出电流设计成用户可调,有些驱动器可以通过可调电位器(adjustable trim pot)改变输出电流波形,有些可调节增益,还有一些可以通过图形用户界面下载特定的正弦表来适配电机特性。可调电位器允许用户手动调整驱动器输出电流来匹配电机特性而无需了解电机和驱动器的内部技术。然而,对希望获得最佳匹配性能的用户来说这些方法仍有缺陷。
W1WW_P4LCJS_COM-PLC-技.术_网
典型的细分模式包括2、4、8、16、32、64、128及256微步;提高细分数也就相应提高了单步精度(将整步按细分数等分来提高精度)。例如,一台0.9度的步进电机如果用64细分的驱动模式,步矩角可以达到0.014度。当然,驱动器也必须按照细分规律提供给电机精确的电流值。
W1WW_P4LCJS_COM-PLC-技.术_网
图例为4细分驱动模式下电机各相空间矢量图以及相电流随时间变化的示意图,可以直观地表示出驱动器每微步必须给出的电机相电流的大小和方向。从驱动器的角度来说,输出电流的主要部件是集成驱动芯片。驱动器的性能由芯片的设计决定。其他如选用的MOSFET、电阻电容、电路布线、相应的固件(软件)以及不合理的散热方式等也会影响其性能。因此即使驱动控制芯片能给出平滑且精确的正弦电流波形,仍然不能保证获得最优的精度。
WW.W_PLCJS_COM-PLC-技.术_网
在相绕组空间示意图中的位置12处,A相和B相的座标百分值是(100,0)。驱动器输出100%的电流给A相,而B相电流为0%。当电机运动到位置13时,座标变成(92,38),此时驱动器输出满电流的92%给A相而B相得到38%。按照这样的方式对每一步分析就会知道A相和B相电流是两个互差90度的正弦波。
P.L.C.技.术.网——可编程控制器技术门户
W1WW_P4LCJS_COM-PLC-技.术_网

WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WWW.PLCJS.COM——可编程控制器技术门户
高精度首先来源于步进电机的设计,Lin Enigneering公司的高精度5709型步进电机整步步距角为0.9度,机座号为NEMA23(2.3英寸)匹配RMS公司专为特别平稳的运动控制设计的高精度驱动器R325,构成完美步进电机系统,避免电流波形畸变。
WWcW_PLCJS_COM-PLC-技.术_网
运动控制系统里匹配步进电机和驱动器的5个简单步骤:
plcjs.技.术_网
1. 选择合适的电机(基于对速度和转矩的要求)。
WWcW_PLCJS_COM-PLC-技.术_网
2. 确认电机技术指标中各相电感之间误差在±5%以内。
——可——编——程——控-制-器-技——术——门——户
3. 选择合适的驱动器。如果可能的话,获得驱动器输出的电流波形图。
WW.W_PLCJS_COM-PLC-技.术_网
4. 确认驱动器上有提高运行平稳性的功能或者选项,如调节续流阻尼深度(慢速或者快速电流衰减)或可调整电流波形的电位器。
WWW_PLCJS_COM-PLC-技.术_网
5. 根据驱动器特性匹配电机电感量。通常说来,高电感量电机低速性能较好,但是需要驱动器具备高电流阻尼(快速续流),能让电流在续流期间快速下降。阻尼有助于电感的快速放电。低电感量电机高速性能好,如果驱动器能提供较低的电流阻尼(慢速续流),那么这些电机将呈现出良好的工作特性,因为他们在电感能量泄放过程中无需特别的阻尼帮助。对于一些电感量中等的电机来说,可以选择具备混合续流能力的驱动器。
W1WW_P4LCJS_COM-PLC-技.术_网
WWcW_PLCJS_COM-PLC-技.术_网

WWW_PLC※JS_COM-PmLC-技.术_网
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
一种更直接的提高电机和驱动器整体精度的解决方案就是集成单元。Lin Enigneering公司的SilverPak D就是这么一款集成了电机+驱动,尺寸为NEMA 17(1.7英寸),1.8度双极性步进电机,工作电压范围从+12 到 40V dc。驱动器通过内置的PWM驱动芯片控制,电机相电流能从0.1到 1.5A(峰值)精确控制。步距角可为0.5 0.25 0.125 0.0625 0.03125 及 0.015625 度。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
上一篇: 步进电机原理及使用说明下一篇: 运动控制器与数控装置比较
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行