适用PLC使用的步进电动机控制驱动器
日期:2008-10-30 0:04:29 来源:中国自动化网
点击: 作者:
点击: 作者:
点击【 大 中 小 】放大字体.
传统上,在用PLC控制步进电动机时,通常在PLC中附加一块 专用的步进电动机控制智能模块,再与驱动电源相连接实现控制功能。在市场上,一 台PLC的价格在2000元左右,而一块控制智能模块也值2000元,再加上驱动电源在1500~2500元,在一些小型控制中显得成本过高。本文介绍的一种控制驱动器产品,采用单片机内置 式控制软件,接收PLC的OC门信息,将步进电动机控制模块与驱动电源合二为一,省去了步 进电动机控制智能模块,使成本大为降低。
1系统硬件
如图1所示。该系统采用了闭环控制,有可编程控制器PLC(当然,这里也可以使用PC机等控制)模块,控制驱动器模块和位置传感器模块构成。其中控制驱动模块又有单片机模块和D/A 转换功放模块两个子模块。
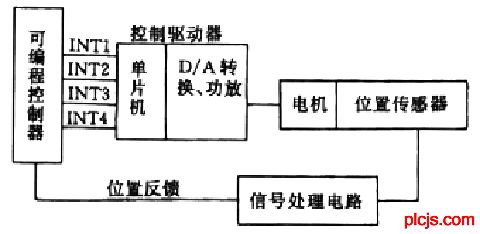
图 1
2系统工作原理
众所周知,普通的PLC可编程控制器,输出为OC门或继电器,很少有高速脉冲输出口,但一 般有脉冲计数输入接口。我们利用这一特征点,通过以下配置可方便地完成机械运动的过程 或位置控制。
在机械运动机构上安装位置控制使用的接近开关或过程控制使用的长光栅,并在运动 机构一端设定限位开关为机械原点(可用光电、霍尔元件),远离限位开关为步进电动机运行 的正方向。当步进电动机通电后,首先向机械原点运行,当碰到限位开关时,PLC内部的计 数器自动清零。如我们要进行机械运动的过程控制,通过光栅与步进电动机带动的机械部件 相连,确定步进电动机与光栅的脉冲当量值之后,即可在PLC可编程控制器上编程实现高速 高效的过程控制了。例如:步进电动机的脉冲当量为0.001mm,与之配合的光栅反馈脉冲也 选配输出每个脉冲为0.001mm,这样步进电动机每走一步,光栅反馈一次信号到PLC内,计 数器则加(或减)一。
由于该步进电动机控制驱动器有7种速度可选,在不同的运动情况下选不同的速度,当运行到确定的位置后,停止步进电动机即可。同时,控制驱动器内还自带升降频控制、整步/细 分切换等功能,所以PLC的控制使用十分方便。
3系统软件
该系统的核心是单片机软件部分。它是该系统的一个重要特征。
(1)软件模块
软件由以下几个主要模块组成。其中有些模块还有子模块。如图2所示。
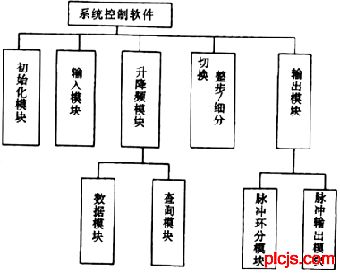
图 2
初始化模块:清理程序中所需的标志位,判断是否需要起动电动机并复位电动机。
输入模块:CPU接收来自INT1~INT4的电平信号。其中INT1~INT3的各种不同组合用以选择7种常用频率来驱动电动机。参见附表。INT4决定运动方向(1表示正转,0表示反转)。
附表 编码信息与频率关系
INT1 INT2 INT3 说明(频率f/Hz)
1
1
1
1
0
0
0
0 1
1
0
0
1
1
0
0 1
0
1
0
1
0
1
0 复位f=0
细分f=100
细分f=250
细分f=500
细分f=1000
细分f=2500
细分f=5000
整步f=10
升降频模块:此模块包括升降数据表和查询数据表并给计数器T0赋值两个子模块。它保证在两种频率之间切换时平稳圆滑过渡且不失步。
整步/细分切换模块:程序确定将七种常用频率以细分形式驱动电动机,以满足电动 机处于工作状态时的不同需要;并将最高频率设置成整步驱动电动机,使电动机能高速空走。本 模块负责完成从整步到细分、从细分到整步的切换。
输出模块:此模块包括脉冲环分和环分脉冲输出两个子模块。本例以二相二十拍为例编写程序。改变此模块可以广泛适用于各种不同相、拍的步进电动机。
(2)曲线处理
程序升降频过程中,涉及到“最优化升降频曲线”。如图3所示,这条曲线的方程由电动机参数决定。详细说明,查阅其他资料。在处理这条曲线时,由时间t每递增Δt所对应的频率f构成一张表,并对应生成一页MCS_51汇编语言数据表(计时器T0的初值),以查询数据表的方式来拟合这条曲线,实现优化升降频过程。
>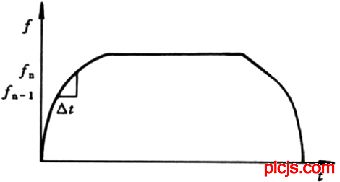
图 3
4总结
同传统驱动器相比,该控制驱动器以软件代替硬件步进电动机控制器和硬件脉冲环分电路, 结构简单,成本节约,同时为用户二次开发利用提供便利。采用闭环控制,根据位置传感器的不同种类和精度,可广泛适用于坐标测量仪、比长仪等各种不同精度的精密仪器和机床设 备。
WWcW_PLCJS_COM-PLC-技.术_网
1系统硬件
WWW_PLC※JS_COM-PmLC-技.术_网
如图1所示。该系统采用了闭环控制,有可编程控制器PLC(当然,这里也可以使用PC机等控制)模块,控制驱动器模块和位置传感器模块构成。其中控制驱动模块又有单片机模块和D/A 转换功放模块两个子模块。
——可——编——程——控-制-器-技——术——门——户
W1WW_P4LCJS_COM-PLC-技.术_网
图 1
WWW_PLC※JS_COM-PmLC-技.术_网
2系统工作原理
——可——编——程——控-制-器-技——术——门——户
众所周知,普通的PLC可编程控制器,输出为OC门或继电器,很少有高速脉冲输出口,但一 般有脉冲计数输入接口。我们利用这一特征点,通过以下配置可方便地完成机械运动的过程 或位置控制。
WWcW_PLCJS_COM-PLC-技.术_网
在机械运动机构上安装位置控制使用的接近开关或过程控制使用的长光栅,并在运动 机构一端设定限位开关为机械原点(可用光电、霍尔元件),远离限位开关为步进电动机运行 的正方向。当步进电动机通电后,首先向机械原点运行,当碰到限位开关时,PLC内部的计 数器自动清零。如我们要进行机械运动的过程控制,通过光栅与步进电动机带动的机械部件 相连,确定步进电动机与光栅的脉冲当量值之后,即可在PLC可编程控制器上编程实现高速 高效的过程控制了。例如:步进电动机的脉冲当量为0.001mm,与之配合的光栅反馈脉冲也 选配输出每个脉冲为0.001mm,这样步进电动机每走一步,光栅反馈一次信号到PLC内,计 数器则加(或减)一。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
由于该步进电动机控制驱动器有7种速度可选,在不同的运动情况下选不同的速度,当运行到确定的位置后,停止步进电动机即可。同时,控制驱动器内还自带升降频控制、整步/细 分切换等功能,所以PLC的控制使用十分方便。
WW.W_PLC※JS_C,OM-PL,C-技.术_网
3系统软件
WW.W_PLC※JS_C,OM-PL,C-技.术_网
该系统的核心是单片机软件部分。它是该系统的一个重要特征。
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
(1)软件模块
WWW_P※LCJS_CO※M-PLC-技-.术_网
软件由以下几个主要模块组成。其中有些模块还有子模块。如图2所示。
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_PLCJS_COM-PLC-技.术_网
P.L.C.技.术.网——可编程控制器技术门户
图 2
WW.W_PLCJS_COM-PLC-技.术_网
初始化模块:清理程序中所需的标志位,判断是否需要起动电动机并复位电动机。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
输入模块:CPU接收来自INT1~INT4的电平信号。其中INT1~INT3的各种不同组合用以选择7种常用频率来驱动电动机。参见附表。INT4决定运动方向(1表示正转,0表示反转)。
WW.W_PLCJS_COM-PLC-技.术_网
附表 编码信息与频率关系
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
INT1 INT2 INT3 说明(频率f/Hz)
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
1
WWW_PLCJS@_COM%-PLC-技.术_网
1
WW.W_PLC※JS_C,OM-PL,C-技.术_网
1
WW.W_PLCJS_COM-PLC-技.术_网
1
——可——编——程——控-制-器-技——术——门——户
0
W1WW_P4LCJS_COM-PLC-技.术_网
0
WWcW_PLCJS_COM-PLC-技.术_网
0
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
0 1
WW.W_PLC※JS_C,OM-PL,C-技.术_网
1
WWW_PLCJS_COM-PLC-技.术_网
0
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
0
WWW_P※LCJS_CO※M-PLC-技-.术_网
1
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
1
plcjs.技.术_网
0
WWW_PL※CJS_COM-PLC-技.术_网
0 1
WWW_P※LCJS_CO※M-PLC-技-.术_网
0
WWW_P※LCJS_CO※M-PLC-技-.术_网
1
P.L.C.技.术.网——可编程控制器技术门户
0
WWW.PLCJS.COM——可编程控制器技术门户
1
plcjs.技.术_网
0
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
1
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
0 复位f=0
WW.W_PLC※JS_C,OM-PL,C-技.术_网
细分f=100
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
细分f=250
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
细分f=500
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
细分f=1000
WWW_PLCJS_COM-PLC-技.术_网
细分f=2500
WWW_PLC※JS_COM-PmLC-技.术_网
细分f=5000
WWW_PLCJS@_COM%-PLC-技.术_网
整步f=10
WWW_PLCJS@_COM%-PLC-技.术_网
升降频模块:此模块包括升降数据表和查询数据表并给计数器T0赋值两个子模块。它保证在两种频率之间切换时平稳圆滑过渡且不失步。
W1WW_P4LCJS_COM-PLC-技.术_网
整步/细分切换模块:程序确定将七种常用频率以细分形式驱动电动机,以满足电动 机处于工作状态时的不同需要;并将最高频率设置成整步驱动电动机,使电动机能高速空走。本 模块负责完成从整步到细分、从细分到整步的切换。
WWW_P※LCJS_COM-PLC-)技.术_网
输出模块:此模块包括脉冲环分和环分脉冲输出两个子模块。本例以二相二十拍为例编写程序。改变此模块可以广泛适用于各种不同相、拍的步进电动机。
WWW_PLC※JS_COM-PmLC-技.术_网
(2)曲线处理
WWW.PLCJS.COM——可编程控制器技术门户
程序升降频过程中,涉及到“最优化升降频曲线”。如图3所示,这条曲线的方程由电动机参数决定。详细说明,查阅其他资料。在处理这条曲线时,由时间t每递增Δt所对应的频率f构成一张表,并对应生成一页MCS_51汇编语言数据表(计时器T0的初值),以查询数据表的方式来拟合这条曲线,实现优化升降频过程。
WWW_PLC※JS_COM-PmLC-技.术_网
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
>
——可——编——程——控-制-器-技——术——门——户
图 3
——可——编——程——控-制-器-技——术——门——户
4总结
WWcW_PLCJS_COM-PLC-技.术_网
同传统驱动器相比,该控制驱动器以软件代替硬件步进电动机控制器和硬件脉冲环分电路, 结构简单,成本节约,同时为用户二次开发利用提供便利。采用闭环控制,根据位置传感器的不同种类和精度,可广泛适用于坐标测量仪、比长仪等各种不同精度的精密仪器和机床设 备。
WWW_PLCJS@_COM%-PLC-技.术_网
上一篇: 电机基本知识和怎样正确选择电动机下一篇: 没有了
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行