一种新的基于GPS/INS的组合导航方法
日期:2010-4-7 10:34:11 点击:
来源:中国工控网
作者:
来源:中国工控网
作者:
点击【 大 中 小 】放大字体.
1 引言
以全球定位系统(GPS)和惯性导航系统(INS)构造的组合导航系统是导航中最主要的组合方式,它有效利用了GPS和INS各自的优点,进行系统间的取长补短,这种组合能有效减小系统误差,提高系统的精度,而且还可以降低导航的成本。因而在航空、航天、航海、陆地战车等导航领域都得到越来越广泛的应用。常用的GPS /INS组合方式有以下两种:1)松散组合,即位置、速度组合;2)紧密组合,即伪距、伪距率组合。通常紧密组合的导航精度比松散组合的精度高[1]。在GPS信号接收正常时,组合导航系统能够提供良好的导航性能。但是载体在高动态环境下,GPS信号会失锁甚至有时会完全丢失,滤波器输出就会发散,使导航性能严重恶化。
本文提出用人工神经网络(ANN)来辅助GPS/INS组合导航系统。
2 ANN辅助的紧密组合GPS/INS系统结构
在没有干扰或机动不大的环境中,GPS的载波环对码环进行速度辅助,即提供码环多普勒频率值。在高动态或大机动的环境中,GPS接收机的载波环失锁,利用惯性补偿技术,将由INS速度辅助码环[6]。采用ANN辅助的紧密组合GPS/INS系统原理框图如图1所示。
在GPS触发的每一个滤波周期开始,以GPS/INS的相关状态作为ANN的输入,以当前和前一个更新周期的位置之差作为输出对ANN进行训练。当GPS信号丢失时,ANN进入估计状态,每秒估计一次位置差。把这些每秒估计的位置差累加到GPS信号丢失那一刻的位置以计算载体的位置,然后把ANN估计的位置转化为伪距代替GPS信号作为Kalman滤波器输入。利用这种方法,与没有ANN辅助的Kalman 滤波结构相比,可以有效减缓系统的漂移[2]。
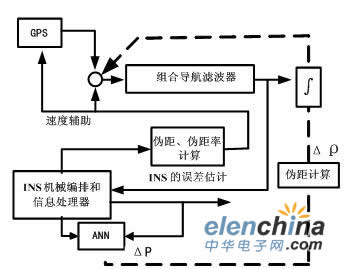
图1 ANN辅助GPS/INS原理框图
3 GPS/INS组合导航滤波器的数学模型
3.1 Kalman滤波器的状态方程
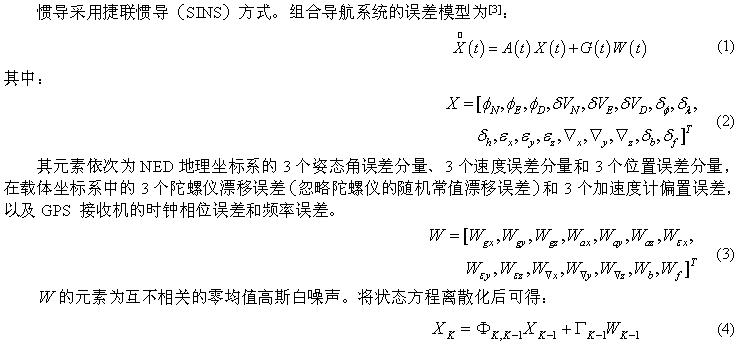
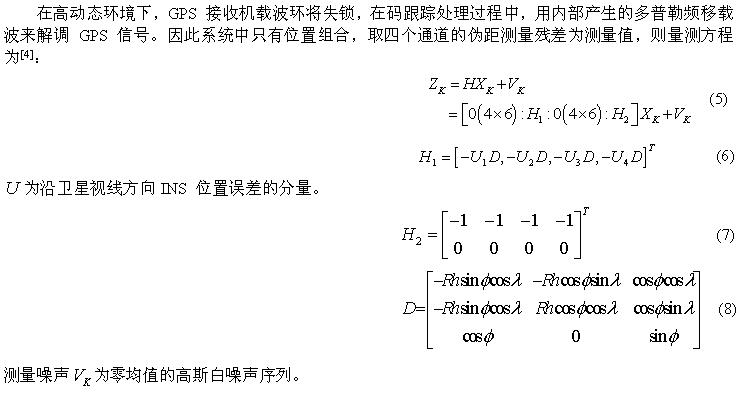
3.2 Kalman滤波器的量测方程
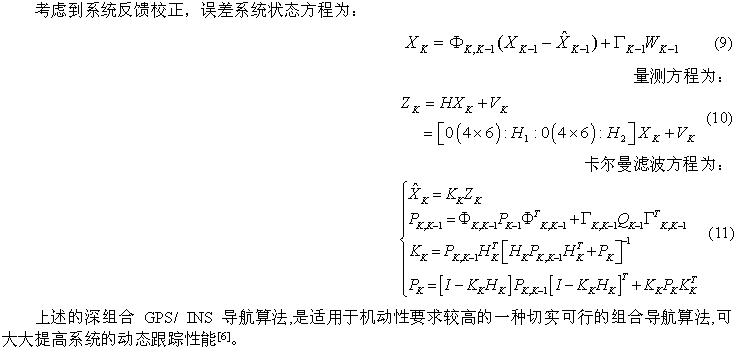
3.3 Kalman滤波组合方程
4 BP神经网络辅助Kalman滤波
4.1 BP神经网络
4.2 弹性梯度下降法
5 仿真算例
仿真运算的结果如表1。
导航信息初始误差为:水平姿态角误差10。;方位误差角10。;位置误差50m;速度误差0.6m/s。设计一条飞行航道,整个过程包括初始飞行、转弯、加速、平飞等过程。
飞行轨迹如图2,飞行时的速度变化曲线如图3。其初始速度为600m/s,在100s转弯时法向加速度为2g,在300s时的加速度为2g。
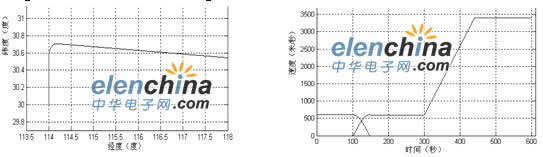
图2 水平飞行剖面图 图3 速度变化曲线图
设在300s时丢失GPS信号,无ANN辅助的系统位置误差如图4所示,有ANN辅助的系统位置误差如图5所示。
从仿真结果可以看出:当GPS信号丢失时,没有人工神经网络辅助的系统会很快发散,东向误差在305s达到1000m,北向误差在310s达到1000m;而有人工神经网络辅助的系统在350s误差也不过50m,漂移显著减缓。

图4 无ANN辅助的位置误差图
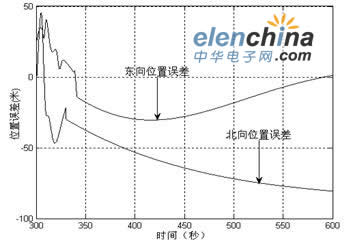
图5 有ANN辅助的位置误差图
6 结论
本文以高动态载体的导航问题为应用背景,提出了一种新的BP神经网络辅助组合导航系统的结构,并给出了相应的算法。通过本文的论述和仿真表明:在GPS信号丢失时,该方法能够有效减缓系统的漂移。
应该指出,用于训练BP网络模型的样本数据应具有较高的精度,使网络能够充分提取训练对象的结构特征,以便更好的模拟对象的输入与输出行为。作为算例,本文仅使用轨迹产生器的数据和经Kalman滤波的输出构成样本数据, BP网络自然不能完全逼近原始系统模型的非线性特征。在实际工程应用中,通过实验获取能够代表系统输入与输出本质特征的样本数据,使设计的BP网络得到充分训练,以满足高动态环境的要求。
参考文献
[1] 杨艳娟.一种新的INS/GPS组合导航技术[J].中国惯性技术学报,2004,12卷(2期):23-26.
[2] Brurak H Kaygisiz.GPS/INS Enancement Using Neural Networks for Autonomous Ground Vehicle Application[J].IEEE,2003,0-7803-4860-1/03:3763-3768.
[3] 袁信.导航系统[M]北京 航空工业出版社,1993.
[4] 王惠南.GPS导航原理与应用 [M]北京:科学出版社,2003.
[5] 董长虹.Matlab神经网络与应用 [M]北京:国防工业出版社,2005.
[6] 王忠.高动态GPS/INS组合导航算法研究 [J].系统工程与电子技术,2005,23卷(1期):48-50.
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW.PLCJS.COM——可编程控制器技术门户
以全球定位系统(GPS)和惯性导航系统(INS)构造的组合导航系统是导航中最主要的组合方式,它有效利用了GPS和INS各自的优点,进行系统间的取长补短,这种组合能有效减小系统误差,提高系统的精度,而且还可以降低导航的成本。因而在航空、航天、航海、陆地战车等导航领域都得到越来越广泛的应用。常用的GPS /INS组合方式有以下两种:1)松散组合,即位置、速度组合;2)紧密组合,即伪距、伪距率组合。通常紧密组合的导航精度比松散组合的精度高[1]。在GPS信号接收正常时,组合导航系统能够提供良好的导航性能。但是载体在高动态环境下,GPS信号会失锁甚至有时会完全丢失,滤波器输出就会发散,使导航性能严重恶化。
P.L.C.技.术.网——可编程控制器技术门户
WWW_PL※CJS_COM-PLC-技.术_网
本文提出用人工神经网络(ANN)来辅助GPS/INS组合导航系统。
WWW.PLCJS.COM——可编程控制器技术门户
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
2 ANN辅助的紧密组合GPS/INS系统结构
WW.W_PLC※JS_C,OM-PL,C-技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
在没有干扰或机动不大的环境中,GPS的载波环对码环进行速度辅助,即提供码环多普勒频率值。在高动态或大机动的环境中,GPS接收机的载波环失锁,利用惯性补偿技术,将由INS速度辅助码环[6]。采用ANN辅助的紧密组合GPS/INS系统原理框图如图1所示。
——可——编——程——控-制-器-技——术——门——户
——可——编——程——控-制-器-技——术——门——户
在GPS触发的每一个滤波周期开始,以GPS/INS的相关状态作为ANN的输入,以当前和前一个更新周期的位置之差作为输出对ANN进行训练。当GPS信号丢失时,ANN进入估计状态,每秒估计一次位置差。把这些每秒估计的位置差累加到GPS信号丢失那一刻的位置以计算载体的位置,然后把ANN估计的位置转化为伪距代替GPS信号作为Kalman滤波器输入。利用这种方法,与没有ANN辅助的Kalman 滤波结构相比,可以有效减缓系统的漂移[2]。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
——可——编——程——控-制-器-技——术——门——户
图1 ANN辅助GPS/INS原理框图
WWW_P※LCJS_COM-PLC-)技.术_网
3 GPS/INS组合导航滤波器的数学模型
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
plcjs.技.术_网
3.1 Kalman滤波器的状态方程
WWW_PLCJS_COM-PLC-技.术_网
plcjs.技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
3.2 Kalman滤波器的量测方程
WWW_PL※CJS_COM-PLC-技.术_网
——可——编——程——控-制-器-技——术——门——户
plcjs.技.术_网
P.L.C.技.术.网——可编程控制器技术门户
3.3 Kalman滤波组合方程
WWW_PLC※JS_COM-PmLC-技.术_网
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_PLCJS_COM-PLC-技.术_网
4 BP神经网络辅助Kalman滤波
——可——编——程——控-制-器-技——术——门——户
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
4.1 BP神经网络
WWW_PLCJS_COM-PLC-技.术_网
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WW.W_PLCJS_COM-PLC-技.术_网
4.2 弹性梯度下降法
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
5 仿真算例
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
W1WW_P4LCJS_COM-PLC-技.术_网
仿真运算的结果如表1。
WWW_P※LCJS_CO※M-PLC-技-.术_网
表1:各传感器的精度

WWW.PLCJS.COM——可编程控制器技术门户
WWW_PLCJS@_COM%-PLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
导航信息初始误差为:水平姿态角误差10。;方位误差角10。;位置误差50m;速度误差0.6m/s。设计一条飞行航道,整个过程包括初始飞行、转弯、加速、平飞等过程。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_P※LCJS_COM-PLC-)技.术_网
飞行轨迹如图2,飞行时的速度变化曲线如图3。其初始速度为600m/s,在100s转弯时法向加速度为2g,在300s时的加速度为2g。
WW.W_PLCJS_COM-PLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
图2 水平飞行剖面图 图3 速度变化曲线图
WWW_PL※CJS_COM-PLC-技.术_网
设在300s时丢失GPS信号,无ANN辅助的系统位置误差如图4所示,有ANN辅助的系统位置误差如图5所示。
W1WW_P4LCJS_COM-PLC-技.术_网
WWW.PLCJS.COM——可编程控制器技术门户
从仿真结果可以看出:当GPS信号丢失时,没有人工神经网络辅助的系统会很快发散,东向误差在305s达到1000m,北向误差在310s达到1000m;而有人工神经网络辅助的系统在350s误差也不过50m,漂移显著减缓。
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WWW.PLCJS.COM——可编程控制器技术门户
WWW_P※LCJS_CO※M-PLC-技-.术_网
图4 无ANN辅助的位置误差图
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
P.L.C.技.术.网——可编程控制器技术门户
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
图5 有ANN辅助的位置误差图
WWcW_PLCJS_COM-PLC-技.术_网
6 结论
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_PLCJS_COM-PLC-技.术_网
本文以高动态载体的导航问题为应用背景,提出了一种新的BP神经网络辅助组合导航系统的结构,并给出了相应的算法。通过本文的论述和仿真表明:在GPS信号丢失时,该方法能够有效减缓系统的漂移。
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
应该指出,用于训练BP网络模型的样本数据应具有较高的精度,使网络能够充分提取训练对象的结构特征,以便更好的模拟对象的输入与输出行为。作为算例,本文仅使用轨迹产生器的数据和经Kalman滤波的输出构成样本数据, BP网络自然不能完全逼近原始系统模型的非线性特征。在实际工程应用中,通过实验获取能够代表系统输入与输出本质特征的样本数据,使设计的BP网络得到充分训练,以满足高动态环境的要求。
WWW_P※LCJS_COM-PLC-)技.术_网
WW.W_PLCJS_COM-PLC-技.术_网
参考文献
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
[1] 杨艳娟.一种新的INS/GPS组合导航技术[J].中国惯性技术学报,2004,12卷(2期):23-26.
WW.W_PLCJS_COM-PLC-技.术_网
[2] Brurak H Kaygisiz.GPS/INS Enancement Using Neural Networks for Autonomous Ground Vehicle Application[J].IEEE,2003,0-7803-4860-1/03:3763-3768.
WWW_PLC※JS_COM-PmLC-技.术_网
[3] 袁信.导航系统[M]北京 航空工业出版社,1993.
WWW_P※LCJS_COM-PLC-)技.术_网
[4] 王惠南.GPS导航原理与应用 [M]北京:科学出版社,2003.
WWW_P※LCJS_CO※M-PLC-技-.术_网
[5] 董长虹.Matlab神经网络与应用 [M]北京:国防工业出版社,2005.
WWW.PLCJS.COM——可编程控制器技术门户
[6] 王忠.高动态GPS/INS组合导航算法研究 [J].系统工程与电子技术,2005,23卷(1期):48-50.
WWcW_PLCJS_COM-PLC-技.术_网
上一篇: 诠析无线LED信息发布系统下一篇: NT30-DPS在邦纳(BANNER)传感器上的应用
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行