CAN总线在多电机软起动系统中的应用
日期:2007-7-24 23:07:51 来源:本文摘自《PLC&FA》
点击: 作者:未知
点击: 作者:未知
点击【 大 中 小 】放大字体.
随着国民经济的飞速发展,交流电动机在工业生产中扮演了极为重要的角色,作为各行业中的主要拖动电机,应用更为广泛。众所周知,交流电动机在全压起动时,起动电流达到额定电流的5~7倍,会对电网造成冲击;起动转矩约为额定转矩的2倍,加剧机械结构磨损。为了解决交流电动机的起动问题,通常需要使用软起动器进行软起动。
当前软起动器的监控一般由各自独立的监控单元进行,无法对整个系统实现全面的控制和监测。因此,建立一套数据通信系统将各软起动监控节点连接起来,组成完整的监控网络就显得非常必要。
相对于RS-485等通信标准,CAN(Controller Area Network)总线以其具有的诸多优点而在许多领域得到了应用。CAN总线是德国Bosch公司于上世纪80年代初推出的一种多主局域网,CAN通信网络是一种全分散、全数字化的智能双向、多变量、多点、多站的分布式通信体系,具有可靠性高、稳定性好、抗干扰能力强、通信速度块、成本低等诸多优点。CAN总线是一种非常适合工业现场恶劣环境的通信方式。本文介绍了一种基于CAN总线的交流电机软起动通信系统。
本系统中,CAN通信采用CAN2.0B标准中带29位报文标识符的扩展帧。报文标识符中包含紧急标记、目的地址、源地址、帧类型、帧号,其格式如表1所示。
目的地址共7位,指示该帧所要到达的目的地,可以是某一具体地址,也可以是广播地址(主要用于工控机以广播方式向各软起动器传送数据,如对时数据等)。
源地址共7位,指示该帧的来源地址。
帧类型有4位,说明了该帧的类型,如工控机控制命令、软起动实时数据等。
帧号共8位,用来在多帧传输中标记该帧的序号。
每个CAN通信节点都有一个唯一的地址号,地址号使用7位二进制数表示。其中,优先级最高的地址分配给工控机,优先级最低的地址作为广播方式的目的地址,其它地址依次分配给各软起动器。
CAN节点采用双滤波方式获取本节点所需信息,两个滤波器均采用7位有效数据,分别对应节点地址和广播方式下的地址。这样,就仅有发往该节点的帧和广播帧能够进入应用层进行处理,其它无关通信内容都被过滤掉,提高了系统运行效率。
1 引言
WWW_PLCJS_COM-PLC-技.术_网
随着国民经济的飞速发展,交流电动机在工业生产中扮演了极为重要的角色,作为各行业中的主要拖动电机,应用更为广泛。众所周知,交流电动机在全压起动时,起动电流达到额定电流的5~7倍,会对电网造成冲击;起动转矩约为额定转矩的2倍,加剧机械结构磨损。为了解决交流电动机的起动问题,通常需要使用软起动器进行软起动。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
当前软起动器的监控一般由各自独立的监控单元进行,无法对整个系统实现全面的控制和监测。因此,建立一套数据通信系统将各软起动监控节点连接起来,组成完整的监控网络就显得非常必要。
WWcW_PLCJS_COM-PLC-技.术_网
相对于RS-485等通信标准,CAN(Controller Area Network)总线以其具有的诸多优点而在许多领域得到了应用。CAN总线是德国Bosch公司于上世纪80年代初推出的一种多主局域网,CAN通信网络是一种全分散、全数字化的智能双向、多变量、多点、多站的分布式通信体系,具有可靠性高、稳定性好、抗干扰能力强、通信速度块、成本低等诸多优点。CAN总线是一种非常适合工业现场恶劣环境的通信方式。本文介绍了一种基于CAN总线的交流电机软起动通信系统。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
2 CAN通信系统结构WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
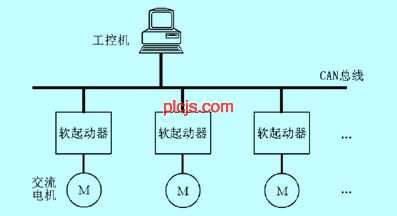
交流电机软起动通信系统由一台工控机作为监控主机,工控机通过CAN总线接口接入CAN总线,各节点是由单片机控制的具有CAN总线数据收发功能的交流电机软起动器。系统结构如图1所示。
WWcW_PLCJS_COM-PLC-技.术_网
WWW_PLCJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
图1 通信系统结构框图
WWW_P※LCJS_COM-PLC-)技.术_网
通信系统各部分提供了不同的功能。其中,工控机控制交流电机软起动器的工作状态,例如软起动、软停车等,显示软起动的各项参数如起动电压、起动电流等。软起动器按照工控机的命令控制交流电机软起动,并采集电机起动电流、电压等参数,通过CAN总线发往工控机。
WWW_P※LCJS_COM-PLC-)技.术_网
3 CAN通信协议WWW_PLC※JS_COM-PmLC-技.术_网
本通信系统中,传输的数据长度不是固定的。工控机向软起动器下达的控制命令只有几个字节,而软起动器向工控机上传的软起动实时数据一般有几十个字节。因此CAN通信协议需要有大数据量传输能力,又要快速高效。由于CAN通信采用短帧结构,每帧有效数据长度最多为8个字节,在传输数据量较大时,就要将数据拆分为多个帧进行传输。如果将所有信息和数据都放在8个字节的数据场中,将会使传输帧中有效数据少,通信信息多,降低CAN总线通信效率。所以,本文采用了利用报文标识符中的仲裁场包含通信控制信息,数据场包含实际数据的方法,以提高通信效率。
plcjs.技.术_网
本系统中,CAN通信采用CAN2.0B标准中带29位报文标识符的扩展帧。报文标识符中包含紧急标记、目的地址、源地址、帧类型、帧号,其格式如表1所示。
WWW_P※LCJS_COM-PLC-)技.术_网
表1 扩展帧报文标识符格式
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户

WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_PLCJS@_COM%-PLC-技.术_网
其中紧急标记仅有1位,用来标记当前帧的优先级,对于一般信息,该位置1,对于紧急信息(如三相电压不平衡、过流、软起动器组件故障等报警信号)该位置0,从而使其拥有高优先级,尽快传送到目的地。
WWW.PLCJS.COM——可编程控制器技术门户
目的地址共7位,指示该帧所要到达的目的地,可以是某一具体地址,也可以是广播地址(主要用于工控机以广播方式向各软起动器传送数据,如对时数据等)。
WWW_PLCJS@_COM%-PLC-技.术_网
源地址共7位,指示该帧的来源地址。
WW.W_PLCJS_COM-PLC-技.术_网
帧类型有4位,说明了该帧的类型,如工控机控制命令、软起动实时数据等。
WWW_PLC※JS_COM-PmLC-技.术_网
帧号共8位,用来在多帧传输中标记该帧的序号。
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
每个CAN通信节点都有一个唯一的地址号,地址号使用7位二进制数表示。其中,优先级最高的地址分配给工控机,优先级最低的地址作为广播方式的目的地址,其它地址依次分配给各软起动器。
WWW_P※LCJS_COM-PLC-)技.术_网
CAN节点采用双滤波方式获取本节点所需信息,两个滤波器均采用7位有效数据,分别对应节点地址和广播方式下的地址。这样,就仅有发往该节点的帧和广播帧能够进入应用层进行处理,其它无关通信内容都被过滤掉,提高了系统运行效率。
本新闻共2页,当前在第1页1 2
WWW_PLCJS@_COM%-PLC-技.术_网
上一篇: 信息化工厂中的工业以太网下一篇: 现场总线在李家岸引黄涵闸通讯中的应用
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行