点击: 作者:未知
引言
数控系统的振荡现象已成为数控全闭环系统的共同性问题。尤其在卧式带立柱的Z轴和旋转数控工作台B轴,其系统出现振荡的频率较高。该问题已成为影响数控设备正常使用和高度的重要因素之一。
1、产生振荡的原因分析
产生振荡的原因有很多,陈了机械方面存在不可消除的传动间隙、弹性变形、摩擦阻力等诸多因素外,伺服系统的有关参数的影响也是重要的一方面。
伺服系统有交流和直流之分,本文主要讨论直流伺服系统因参数影响引起的振荡。大部分数控机床采用的是全闭环方式,其控制原理图如图1所示。
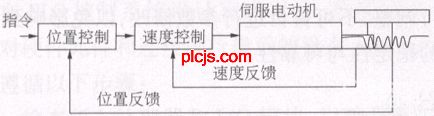
图1 伺服全闭环系统
由图1可看出,引起伺报系统振动的原因大致有四种情况:
a. 位置环不良又引起输
b. 速度环不良引起的振动;
c. 伺服系统可调定位器太人引起电压输出失真;
d. 传动机械装置(如丝杆)间隙太大。
这些控制环的输出参数量失真或机械传动装置间隙太大都是引起振动的主要因素。它们都可以通过伺服控制系统进行参数优化。
2、消除振动的基本方法
有些数控伺服系统采用的是半闭环装置,而全闭环伺服系统必须是在期局部半闭环系统不发生振动的前提下进行参数调整,所以两者大同小异,本文为避免重复,暂只讨论全闭环情况下的参数优化方法。
2.1 降低位置环增益
在伺服系统中有参考的标准值,例如FANUCO-C系列为3 000,西门子3系统为 1666,出现振荡可适当降低增益,但不能降太多,因为要保证系统的稳态误差。
2.2 降低负载惯量比
负载惯量比一般设置在发生振动时所示参数的70%左右,如不能消除故障,不宜继续降低该参数值。
2.3 加入比例微积分器(PID)
比例微积分器是一个多功能控制器,它个仅能有效地对电流电压信号进行比例增益,同时可调节输出信号滞后或超的问题,振荡故障有时因输出电流电压发生滞后或超前情况而产生,这时可通过PID来调节输出电流电压相位。
2.4 采用高频抑制功能
以上讨论的是有关低频振荡时参数优化方法,而有时数控系统会因机械上某些振荡原因产生反馈信号中含有高频谐波,这使输出转矩量不恒定,从而产生振动。
对于这种高频振荡情况,可在速度环上加入一阶低通滤波环节,即为转矩滤波器。其控制原理如图2所小。
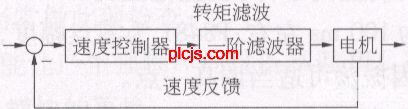
图2 转矩滤波功能图
图2表明,速度指令与速度反馈信号经速度控制器转化为转矩信号,转矩信号通过一阶滤波环节将高频成分截止,从而得到有效的转矩控制信号。通过调节参数可将机械产生的100Hz以上的频率截止,从而达到消除高频振荡的效果。
2.5 采用双位置反馈功能
双反馈是一种改变控制方式的方法,可在同一个系统选择半闭环或全闭环方式,其原理图如图3所示。
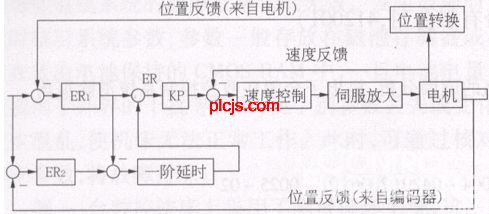
图3 双位置反馈控制原理图
由图3可看出,误差控制器ER1和ER2分别被用于全闭环和半闭环系统中。一阶延时环节的传递函数为(1+τS)-1,可见实际误差ER主要取决于一阶延时环节中时间常数τ,的取值:
&nb
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!