核电站热功率跟踪汽轮机负荷的动态矩阵控制仿真研究(1)
日期:2010-12-9 10:39:10 点击:
来源:网络
作者: 未知
来源:网络
作者: 未知
点击【 大 中 小 】放大字体.
摘要:核电站的动力堆控制系统是一个带不确定参数及干扰的复杂非线性系统,采用常规的古典控制很难保证其热功率精确跟踪汽轮机负荷的变化。该文利用系统单位阶跃响应序列建立了一种非参数模型,并应用动态矩阵控制原理提出了一种动力堆热功率跟踪负荷变化的数字控制新方法。该方法跟踪调节性能好、鲁棒性强、能消除不可测干扰。通过仿真检验和调试证明了该设计方法的正确性和有效性,并实现了热功率———负荷的高精度匹配。
关键词:核反应堆;动态矩阵控制;系统仿真
1、引言
在核电站的运行过程中,反应堆的控制系统起着十分重要的作用。其中动力堆控制系统主要有两个作用:①在稳态运行时,确保反应堆及动力设备的中子通量密度、温度、压力、流量、液位等运行参数保持在各自的控制范围之内;②当核电站汽轮机负荷变化时,反应堆热功率能跟踪负荷的变化,改善过渡过程特性。
本工作主要是就动力堆热功率跟踪负荷变化的问题,提出一种与古典控制方法不同的动态矩阵控制律。由于反应堆动态模型存在着固有的非线性、纯滞后及不确定干扰,传统的小范围模型近似线性化及古典频域控制方法不能很好地满足高精度的跟踪要求。本文所提出的控制方法,不过分依赖于准确数学模型,且具有反馈校正、滚动优化和参考输入轨迹等步骤,是一种先预测系统未来输出,再确定当前控制动作的预测控制方法。它明显优于先有信息反馈,再产生控制动作的经典反馈控制方法。通过仿真检验,证明了本文所提出的方法的正确性和有效性。
2、核电站热功率跟踪系统的结构及非参数模型的建立
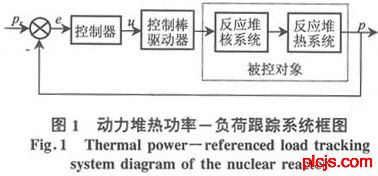
动力堆热功率跟踪系统结构简图如图1。图中的被控对象由反应堆核系统及反应堆热系统组成,其具体结构非常复杂。图1中,u为控制信号,由它直接驱动核反应堆控制棒位移,达到控制核反应程度的目的;pr和p分别为被跟踪的参考负荷信号和实际输出热功率;e为偏差信号,即e=pr-p。在反应堆运行过程中,该控制系统的任务就是使热功率p跟踪参考负荷信号pr。图1中核反应堆的真实数学模型是带纯滞后的、参数不确定的复杂非线性系统,因此,被控对象的精确模型很难获得,即使能获得,也因过于复杂而不利于控制器的设计。
为解决上述问题,建立了一种非参数模型。该方法是先对系统做单位阶跃响应试验,然后截取一定量的试验数据。试验时可用一个单位阶跃的u信号近似作用于被控对象,按照一定的采样周期τ(单位:s)得到输出信号p的序列,这就是系统近似

其中N称为模型时域长度。式(1)即为建立的系统非参数模型。该模型与真实模型相比存在一定的误差,但其优点是形式简单、易于获得,且利于动态矩阵控制器的设计。而这种模型误差和干扰造成的误差均可利用动态矩阵控制算法得以补偿。
由于本文是离线仿真研究,故对一假想的“真实非线性模型”[1]做阶跃响应试验,通过四阶龙格库塔法进行数值积分,其计算公式为
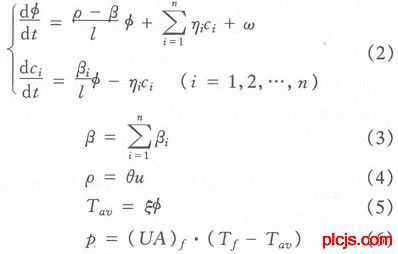
式中φ为中子通量密度;ci为第i组(共n组)缓发中子先驱核数;ρ为控制棒移动产生的反应性变化量;l为中子一代时间,s;t为时间变量,s;βi与ηi(i=1,2,…,n)分别为相应各组的缓发中子份额及衰变常数(s-1);ω为不可测外中子源干扰;Tf为燃料温度,℃;Tav为冷却剂平均温度,℃;(UA)f为燃料的等效传热系数乘燃料表面积,W/℃;p为反应堆热功率,MW。其中,取N=6,测试时采样周期为τ=20s。
WWW_PL※CJS_COM-PLC-技.术_网
摘要:核电站的动力堆控制系统是一个带不确定参数及干扰的复杂非线性系统,采用常规的古典控制很难保证其热功率精确跟踪汽轮机负荷的变化。该文利用系统单位阶跃响应序列建立了一种非参数模型,并应用动态矩阵控制原理提出了一种动力堆热功率跟踪负荷变化的数字控制新方法。该方法跟踪调节性能好、鲁棒性强、能消除不可测干扰。通过仿真检验和调试证明了该设计方法的正确性和有效性,并实现了热功率———负荷的高精度匹配。
WW.W_PLC※JS_C,OM-PL,C-技.术_网
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
关键词:核反应堆;动态矩阵控制;系统仿真
WWcW_PLCJS_COM-PLC-技.术_网
WW.W_PLC※JS_C,OM-PL,C-技.术_网
1、引言
plcjs.技.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
在核电站的运行过程中,反应堆的控制系统起着十分重要的作用。其中动力堆控制系统主要有两个作用:①在稳态运行时,确保反应堆及动力设备的中子通量密度、温度、压力、流量、液位等运行参数保持在各自的控制范围之内;②当核电站汽轮机负荷变化时,反应堆热功率能跟踪负荷的变化,改善过渡过程特性。
WWW_PLCJS@_COM%-PLC-技.术_网
WW.W_PLCJS_COM-PLC-技.术_网
本工作主要是就动力堆热功率跟踪负荷变化的问题,提出一种与古典控制方法不同的动态矩阵控制律。由于反应堆动态模型存在着固有的非线性、纯滞后及不确定干扰,传统的小范围模型近似线性化及古典频域控制方法不能很好地满足高精度的跟踪要求。本文所提出的控制方法,不过分依赖于准确数学模型,且具有反馈校正、滚动优化和参考输入轨迹等步骤,是一种先预测系统未来输出,再确定当前控制动作的预测控制方法。它明显优于先有信息反馈,再产生控制动作的经典反馈控制方法。通过仿真检验,证明了本文所提出的方法的正确性和有效性。
WW.W_PLCJS_COM-PLC-技.术_网
P.L.C.技.术.网——可编程控制器技术门户
2、核电站热功率跟踪系统的结构及非参数模型的建立
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WW.W_PLCJS_COM-PLC-技.术_网
动力堆热功率跟踪系统结构简图如图1。图中的被控对象由反应堆核系统及反应堆热系统组成,其具体结构非常复杂。图1中,u为控制信号,由它直接驱动核反应堆控制棒位移,达到控制核反应程度的目的;pr和p分别为被跟踪的参考负荷信号和实际输出热功率;e为偏差信号,即e=pr-p。在反应堆运行过程中,该控制系统的任务就是使热功率p跟踪参考负荷信号pr。图1中核反应堆的真实数学模型是带纯滞后的、参数不确定的复杂非线性系统,因此,被控对象的精确模型很难获得,即使能获得,也因过于复杂而不利于控制器的设计。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW.PLCJS.COM——可编程控制器技术门户
为解决上述问题,建立了一种非参数模型。该方法是先对系统做单位阶跃响应试验,然后截取一定量的试验数据。试验时可用一个单位阶跃的u信号近似作用于被控对象,按照一定的采样周期τ(单位:s)得到输出信号p的序列,这就是系统近似
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
——可——编——程——控-制-器-技——术——门——户
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
其中N称为模型时域长度。式(1)即为建立的系统非参数模型。该模型与真实模型相比存在一定的误差,但其优点是形式简单、易于获得,且利于动态矩阵控制器的设计。而这种模型误差和干扰造成的误差均可利用动态矩阵控制算法得以补偿。
P.L.C.技.术.网——可编程控制器技术门户
W1WW_P4LCJS_COM-PLC-技.术_网
由于本文是离线仿真研究,故对一假想的“真实非线性模型”[1]做阶跃响应试验,通过四阶龙格库塔法进行数值积分,其计算公式为
WW.W_PLCJS_COM-PLC-技.术_网
WWW.PLCJS.COM——可编程控制器技术门户
plcjs.技.术_网
式中φ为中子通量密度;ci为第i组(共n组)缓发中子先驱核数;ρ为控制棒移动产生的反应性变化量;l为中子一代时间,s;t为时间变量,s;βi与ηi(i=1,2,…,n)分别为相应各组的缓发中子份额及衰变常数(s-1);ω为不可测外中子源干扰;Tf为燃料温度,℃;Tav为冷却剂平均温度,℃;(UA)f为燃料的等效传热系数乘燃料表面积,W/℃;p为反应堆热功率,MW。其中,取N=6,测试时采样周期为τ=20s。
WWcW_PLCJS_COM-PLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
WW.W_PLCJS_COM-PLC-技.术_网
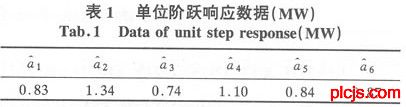
测得响应序列数据列于表1
3、热功率跟踪系统的动态矩阵控制律设计
利用单位阶跃型非参数模型式(1),可以导出热功率跟踪系统的动态矩阵控制律。设k表示当前时刻,则在未来L个时刻的模型输出预测值可用矢量形式表示为

ΔU(k)=[Δu(k),Δu(k+1),…,Δu(k+M-1)]T为从k时刻起M个时刻的控制增量矢量。式中的L为系统输出时域长度,M为系统控制时域长度,且M<L<N。动态矩阵

根据文[2],可导出
P0(k 1)=A0U(k-1)(9)

由于模型误差和干扰等因素的影响,系统的输出预测值需在预测模型输出的基础上用实际输出误差修正,即

将上式展开,可求得从K到K M-1时刻的顺序开环控制增量,即

若只执行当前时刻k的控制增量Δu(k)一步,k+1及k+1以后时刻的控制增量重新计算,就得闭环控制律。这种闭环控制律在执行时,每一步只需计算式(16)的第一行即可。
4、控制系统的计算机仿真
在核反应堆模型式(2)~(6)中,式(4)、(5)均为近似关系,ξ、θ和(UA)f均为常量。若取n=1,并离散化[3]上述模型,可得

为了方便,假设燃料温度Tf为时间k的一次函数Tf(k)=500+10k。则式(17)、(18)、(19)即为所建的被控对象仿真模型。
在仿真时,选择以净化的普通水作为慢化剂和冷却剂、以UO2为核燃料的一组轻水堆实际参数:

机参考负荷输入为

式中

对此设计串联校正控制器,其传递函数为
再代入模型式(2)~(6),在相同初始条件和干扰条件下进行连续系统仿真,结果也示于图2。
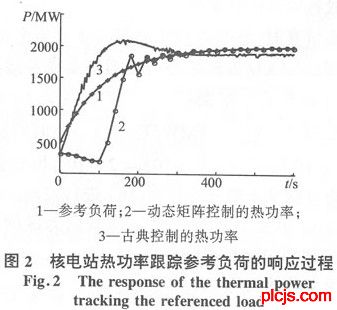
从仿真结果可见:在动态矩阵控制律的作用下,核电站热功率跟踪汽轮机参考负荷的响应过程较古典控制律作用下的响应过程为理想。这主要表现在跟踪精度上,用古典控制律会产生约100MW的稳态误差,而动态矩阵控制却能实现高精度跟踪。另外,响应过程的快速性两者相差无几。而动态矩阵控制的超调量却小于古典控制。所以以上结果证明了本文所提出方法的正确性和有效性。
5、结束语
本文提出了一种核电站动力堆热功率跟踪汽轮机参考负荷变化的动态矩阵数字控制方法。该方法不过分依赖于被控对象的准确数学模型,又具有反馈校正、滚动优化和轨迹参考输入等特点,因此是一种预测控制方法。在控制精度、动态性能和鲁棒性等方面优于经典反馈控制。通过仿真检验,证明了本文所提出方法的优越性和先进性。为核电站的计算机控制指出了一个方向。(作者:史小平,许天舒)
参考文献
[1]傅龙舟(FuLongzhou).核反应堆动力学(Dynamicsofnuclearreactor)[M].北京:原子能出版社(Beijing:AtomicEnergyPress),1988:10-55.
[2]舒迪前(ShuDiqian).预测控制系统及其应用(Predictivecontrolsystemanditsapplication)[M].北京:机械工业出版社(Beijing:MachineIndustryPress),1996:66-70.
[3]凯拉斯(Klath).线性系统(Linearsystem)[M].北京:科学出版社(Beijing:SciencePress),1985:22-103.
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_P※LCJS_CO※M-PLC-技-.术_网
3、热功率跟踪系统的动态矩阵控制律设计
WWW_PLCJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
利用单位阶跃型非参数模型式(1),可以导出热功率跟踪系统的动态矩阵控制律。设k表示当前时刻,则在未来L个时刻的模型输出预测值可用矢量形式表示为
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_PLCJS_COM-PLC-技.术_网
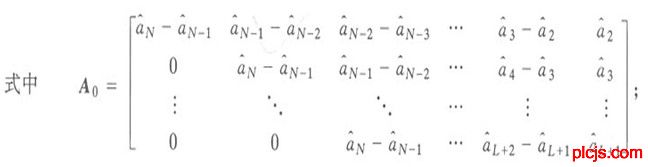
ΔU(k)=[Δu(k),Δu(k+1),…,Δu(k+M-1)]T为从k时刻起M个时刻的控制增量矢量。式中的L为系统输出时域长度,M为系统控制时域长度,且M<L<N。动态矩阵
WWW_PLCJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
——可——编——程——控-制-器-技——术——门——户
根据文[2],可导出
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WWW_P※LCJS_COM-PLC-)技.术_网
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
P0(k 1)=A0U(k-1)(9)
WW.W_PLCJS_COM-PLC-技.术_网
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
P.L.C.技.术.网——可编程控制器技术门户
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
由于模型误差和干扰等因素的影响,系统的输出预测值需在预测模型输出的基础上用实际输出误差修正,即
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WW.W_PLC※JS_C,OM-PL,C-技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
将上式展开,可求得从K到K M-1时刻的顺序开环控制增量,即
W1WW_P4LCJS_COM-PLC-技.术_网
WWcW_PLCJS_COM-PLC-技.术_网
WWW_PLCJS@_COM%-PLC-技.术_网
若只执行当前时刻k的控制增量Δu(k)一步,k+1及k+1以后时刻的控制增量重新计算,就得闭环控制律。这种闭环控制律在执行时,每一步只需计算式(16)的第一行即可。
WW.W_PLCJS_COM-PLC-技.术_网
4、控制系统的计算机仿真
——可——编——程——控-制-器-技——术——门——户
WW.W_PLC※JS_C,OM-PL,C-技.术_网
在核反应堆模型式(2)~(6)中,式(4)、(5)均为近似关系,ξ、θ和(UA)f均为常量。若取n=1,并离散化[3]上述模型,可得
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
plcjs.技.术_网
plcjs.技.术_网
为了方便,假设燃料温度Tf为时间k的一次函数Tf(k)=500+10k。则式(17)、(18)、(19)即为所建的被控对象仿真模型。
WWW_PL※CJS_COM-PLC-技.术_网
WWcW_PLCJS_COM-PLC-技.术_网
在仿真时,选择以净化的普通水作为慢化剂和冷却剂、以UO2为核燃料的一组轻水堆实际参数:
WWW_PLCJS@_COM%-PLC-技.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
——可——编——程——控-制-器-技——术——门——户
P.L.C.技.术.网——可编程控制器技术门户
机参考负荷输入为
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_PLC※JS_COM-PmLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
式中
WWW_P※LCJS_CO※M-PLC-技-.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
对此设计串联校正控制器,其传递函数为
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WW.W_PLC※JS_C,OM-PL,C-技.术_网
再代入模型式(2)~(6),在相同初始条件和干扰条件下进行连续系统仿真,结果也示于图2。
WWW_PLCJS@_COM%-PLC-技.术_网
WW.W_PLC※JS_C,OM-PL,C-技.术_网
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
从仿真结果可见:在动态矩阵控制律的作用下,核电站热功率跟踪汽轮机参考负荷的响应过程较古典控制律作用下的响应过程为理想。这主要表现在跟踪精度上,用古典控制律会产生约100MW的稳态误差,而动态矩阵控制却能实现高精度跟踪。另外,响应过程的快速性两者相差无几。而动态矩阵控制的超调量却小于古典控制。所以以上结果证明了本文所提出方法的正确性和有效性。
WWW_PLCJS@_COM%-PLC-技.术_网
P.L.C.技.术.网——可编程控制器技术门户
5、结束语
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
W1WW_P4LCJS_COM-PLC-技.术_网
本文提出了一种核电站动力堆热功率跟踪汽轮机参考负荷变化的动态矩阵数字控制方法。该方法不过分依赖于被控对象的准确数学模型,又具有反馈校正、滚动优化和轨迹参考输入等特点,因此是一种预测控制方法。在控制精度、动态性能和鲁棒性等方面优于经典反馈控制。通过仿真检验,证明了本文所提出方法的优越性和先进性。为核电站的计算机控制指出了一个方向。(作者:史小平,许天舒)
——可——编——程——控-制-器-技——术——门——户
W1WW_P4LCJS_COM-PLC-技.术_网
参考文献
WWW.PLCJS.COM——可编程控制器技术门户
WW.W_PLC※JS_C,OM-PL,C-技.术_网
[1]傅龙舟(FuLongzhou).核反应堆动力学(Dynamicsofnuclearreactor)[M].北京:原子能出版社(Beijing:AtomicEnergyPress),1988:10-55.
WWW_P※LCJS_CO※M-PLC-技-.术_网
WW.W_PLC※JS_C,OM-PL,C-技.术_网
[2]舒迪前(ShuDiqian).预测控制系统及其应用(Predictivecontrolsystemanditsapplication)[M].北京:机械工业出版社(Beijing:MachineIndustryPress),1996:66-70.
W1WW_P4LCJS_COM-PLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
[3]凯拉斯(Klath).线性系统(Linearsystem)[M].北京:科学出版社(Beijing:SciencePress),1985:22-103.
WWW_PLCJS_COM-PLC-技.术_网
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行