变速恒频风电系统直接功率控制策略的仿真研究
日期:2009-7-23 23:45:00 来源:中国工控网
点击: 作者:
点击: 作者:
点击【 大 中 小 】放大字体.
ABSTRACT: In this paper, the direct power control method (DPC) on the variable speed constant frequency (VSCF) wind power generation system was investigated. First of all the DPC scheme was analyzed; then the conclusion that base on MT-reference frame was extend to the actual system; at last, a simulation of a actual system was build to validate the feasibility and validity of the DPC scheme.
KEYWORDS: VSCF; doubly-fed induction generator; direct power control; simulation
摘要:本文对变速恒频发电系统的直接功率控制策略进行了研究与仿真。首先对直接功率控制原理进行理论分析;然后将MT坐标系下得出的结论推广到实际系统中;最后建立了实际系统的仿真模型,对直接功率控制策略的可行性和有效性进行仿真验证。
关键词:变速恒频;双馈电机;直接功率控制; Matlab仿真
1 引言
目前对双馈发电系统的控制,通常采用定子磁场定向的控制方式,即通过坐标变换把电机的电量转化到MT坐标轴上,实现对输出功率的有功无功解耦,通过调节转子电流的M轴与T轴分量来分别调控电机送出的无功与有功。这样做的优点是有功与无功可以精确调节,但是由于励磁变换器通常是电压源型变换器[1],所以还需要将转子电流指令变成转子电压指令,这在个过程中又会引入耦合,需要加入额外的补偿指令,运算变得复杂[2]。
直接功率控制与上述矢量控制不同,它并不以控制转子电流为目标,而是通过控制转子磁链的大小和相位,直接对输出的有功无功进行调控。与异步电机的直接转矩控制相似,直接功率控制的本质是一种标量控制,它允许有功与无功在一定的容差范围内变化,避免了矢量控制中复杂的坐标变换和补偿调节,控制指令简单直接,易于实现。本文将对直接功率控制策略进行研究与仿真。
2 直接功率控制的基本原理
受到鼠笼型异步电机直接转矩控制的启发,有学者提出了变速恒频双馈风力发电系统的直接功率控制[3]。其控制原理可由图2.1所示的矢量图来说明。
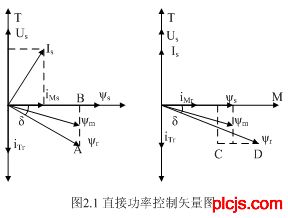
当采用定子磁链矢量定向后,转子的T轴分量只影响发电机的有功功率,而M轴分量只影响发电机的无功功率[4]。以次同步速运行为例,在图2.1(a)中,令转子电流分量iMr=0,转子电流分量iTr从0增加到满载,转子磁链的轨迹由B到A,此时转子磁链与定子磁链之间的角度变化,而转子磁链的幅值基本不变。在图1.1(b)中,令转子电流分量iTr为常数,电流分量iMr从0增加到额定值时,转子磁链的轨迹由C到D,此时转子磁链幅值变化,而转子磁链与定子磁链之间的角度基本不变[5]。
图2.2 (a)是在MT坐标系下,某一输入条件下仿真计算所得的有功无功输出波形,图2.2 (b)是同一条件下转子磁链与定子磁链夹角与幅值波形,由图可知,转子磁链相角与幅值的变化,基本上对应于有功功率与无功功率的变化。
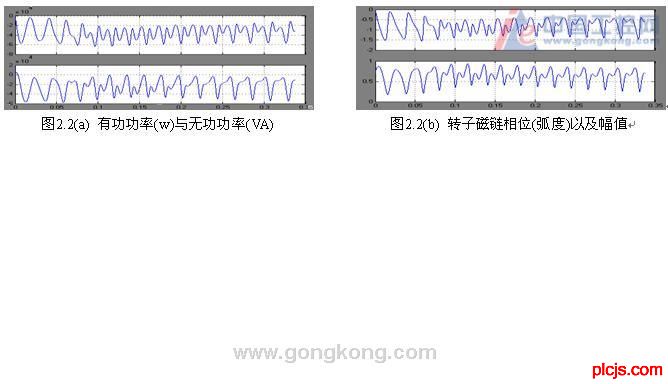
由上述理论分析与仿真均可知,在MT坐标系统上,转子电流iTr变化,则定子侧的有功功率变化,同时转子磁链矢量和定子磁链矢量的夹角亦随之变化;转子电流iMr变化,则定子侧的无功功率变化,同时转子磁链的幅值亦随之变化。因此,可以通过控制转子磁链矢量的角度和幅值来实现有功无功的调控。
3 直接功率控制的实施方法
转子侧的变换器一般为电压源型变换器,能控制的电量是转子侧电压。为了实现直接功率控制,必须分析转子侧变频器输出的电压在次同步速和超同步速运行状态对转子磁链矢量相位和幅值的影响,才能对电机定子有功功率和无功功率实施有效的控制。仍以次同步速运行状态为例分析转子电压对转子磁链的影响。
在MT坐标系统里,忽略转子电阻压降后,转子侧有关系式(3-1);两边求积分后,式(3-1)可以化为(3-2):
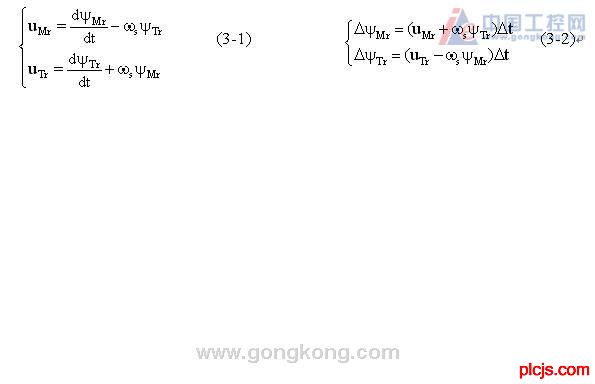
由式(3-2)可知,在一个极短的时间内,转子磁链MT分量的变化,主要由两项分量引起,分别是同轴的电压分量与异轴的磁链分量。在实际中,由于电压分量远远大于磁链分量,所以电压分量对磁链产生主要影响,其变化的方向与电压方向相同。
另外,从空间矢量的角度分析,也可以得到相同的结论。转子侧的相量表达式为式(3-3)[6];由于转子侧的输入电压远大于电阻上的压降,所以当忽略转子电阻上的压降项后,有式(3-4):
由式(3-4)可知,在一个极短的时间段内,作用某一电压矢量后所产生的转子磁链矢量的改变量与该电压矢量具有相同的方向。这就为在实际系统中如何利用电压控制转子磁链提供了理论依据。
4直接功率控制的坐标变换
上述直接功率控制理论是在MT坐标系统中进行分析的,而实际上对双馈发电机的控制是在转子侧进行的。因此,在实际的系统中,还需要加入坐标变换与反变换的模块,才能对电机实现有效的控制。
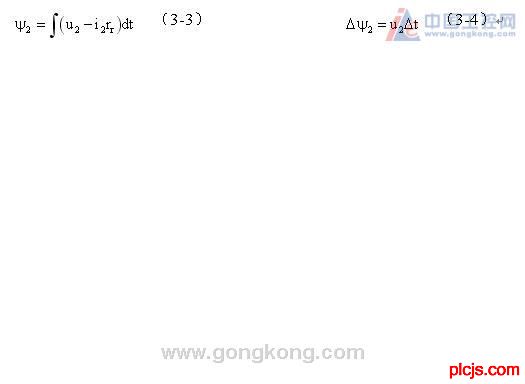
为了取得转子磁链幅值与角度,需要由从电机的可用电量中构造出转子磁链来。转子磁链可以由定子电压与电子电流经过运算得到的。由文献[7]可以得到在MT定向下定子电流与转子电流的关系式(4-1),转子电流与转子磁链的关系式(4-2):
由上述两式可知,为了计算转子磁链,首先必须计算出定子电流的MT分量。以双馈电机运行于次同步速为例,此时电机各量的相量关系如图4.1所示。
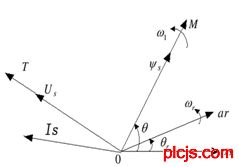
图4.1 电机各量的相量关系图
由相量图的位置关系,首先利用3s/2s变换计算出定子三相电压与定子三相电流相对于定子a相的夹角,两者之差即为定子电压相量与电流相量的夹角。又由于在忽略定子电阻后,M轴滞后Us90o,故用此角度加上90o就得到了定子电流相对于M轴的夹角,用此夹角就可以计算出定子电流的MT分量,进而计 算出转子电流与转子磁链。
在转子侧,施加到转子上的六个电压矢量是以转子a相轴线为基准的,而由上面构造的转子磁链观测器却是以M轴定向的,因此还要把MT分量转化到转子三相坐标系下,转子侧变换器才能对转子磁链实施有效的控制。由图4.1可知,在任意时刻,转子与定子电压矢量的角度差为 ,同时又由于M轴滞后定子电压矢量90o,故M轴与转子a相轴线的夹角为 。这就是MT坐标系与转子三相坐标系的转换依据。
当求得转子磁链在转子三相坐标系中的幅值与夹角后,就可以对电机实施直接功率控制。如图4.2所示,设在某一时刻,输出有功功率大于容许范围,无功功率小于容许范围,则由上节的分析可知,转子磁链夹角要减小,而转子磁链的幅值要增大。若此时转子磁链处于图中的扇区,向转子施加电压矢量U1可以达到控制要求。同理,U6作用时,可以使转子磁链与定子磁链夹角增加且转子磁链的幅值增加,因此U6可以增大输出有功并且增大输出无功。将转子磁链在每一个扇区的情况一一列举,制成控制表,

图4.2 转子侧电压矢量示意图 依滞环比较器的输出状态与转子所在扇区实时查表,决定逆变器的输出,从而实现直接功率控制。
5 直接功率控制的系统仿真
实际系统中的直接功率控制的实现与直接转矩控制相似,有功功率和无功功率分别由两个砰-砰控制器将检测值与给定值进行滞环比较,依据输出量查表,确定转子变频器的开关状态,从而实现双馈电机的直接功率控制。
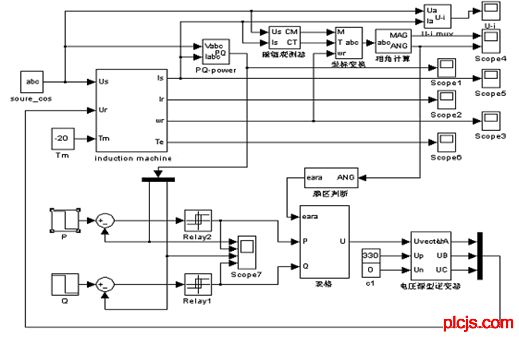
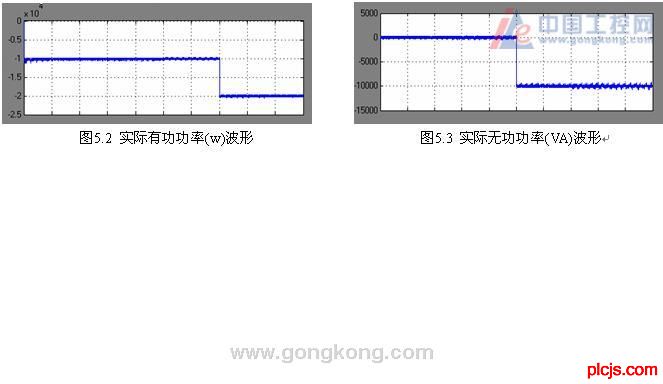

图5.1是由上述理论构造的直接功率控制的双馈发电系统仿真模块。仿真选用的参数为:双馈电机参数Rs=0.4Ω,Rr=0.8Ω,Ls=71.31mL,Lr=71.31mL,Lm=69.31mL,仿真在双馈电机定子输入220V50Hz三相交流电压、输入机械转矩20N?m、逆变器直流输入电压330V、有功给定初值10kW,在0.7秒时突变为20kW、无功给定初值为0VA,在0.5秒时突变为10kVA、滞环比较器容差为100的条件下进行,以验证直接功率控制的控制效果与瞬态响应能力。
仿真系统中,PQ-power模块计算出实际输出的有功与无功,与给定的有功无功指令进行比较,其误差进入滞环比较器,滞环比较器的输出送入表格模块。另一方面,磁链观测器计算出转子磁链在MT坐标系的位置,坐标变换模块把转子磁链转化到转子侧三相旋转坐标系中来,得到转子磁链关于转子a相轴线的夹角,扇区判断则判别转子磁链位于哪一个扇区。以扇区编号和滞环比较器的输出作为依据查表,就可以得到应输出的电压矢量指令,这个电压指令送入电压源型逆变器,逆变器输出六个基本电压矢量中的一个,对双馈电机进行控制。
由图可知,有功与无功以指定值为中心,在容差所设定的范围内波动,这是直接功率控制的滞环调节器在产生作用。由图还可以看出,在给定值突变时,有功无功的实际值均迅速地跟踪指定值,几乎不需要调节过程。
图5.4与图5.5分别是有功与无功给定突变前后输出电压与输出电流的波形。从电流波形可以看出,有功变化时电流幅值变化,无功变化时电流相位变化。由图还可以看出,输出电流具有良好的正弦度,但电流上有许多细小的纹波。这是容差允许误差下产生的,在开关损耗允许的前提下,滞环容差越小,则开关频率越高,纹波的频率越高,电流的波形越好。
由理论与仿真可知,直接功率控制下,较之矢量控制,直接功率控制的控制更为简单,输出电流的瞬态响应更为迅速。在实际的变速恒频发电系统中,直接功率控制是有效可行的。
6 结论
本文首先在MT坐标系里对直接功率控制的原理进行了分析研究,得出了输出功率与转子磁链之间的对应关系,然后分析转子电压来与转子磁链的关系,得出可以通过转子电压来影响转子磁链的结论,并将结论通过坐标变换推广到实际电机的三相系统中来。本文的最后进行了实际系统的仿真,证明了在实际系统中,直接功率控制是有效可行的。
参考文献
[1]贺益康,郑康,潘再平等.交流励磁变速恒频风电系统运行研究[J].电力系统自动化,2004,18(13):55-59
[2]Lei Y Z, Mullane A, Lightbody G.Modeling of The Wind Turbine with A Doubly Fed Induction Generator for Grid Integration Studies [J]. IEEE Transactions on Energy Conversion,Vol.21,No.1,2006,21(1):257-264
[3]Datta R, Ranganachan V T. Direct Power Control of Grid-connected Wound Rotor Induction Machine Without Rotor Position Sensors. IEEE Trans on Power Electronics, 2001, 16(3): 390-399
[4]相会杰,卞松江,吕晓美,郑洪涛.交流励磁变速恒频风力发电系统的实验.太阳能学报,2005,1226(6):773
[5]伍小杰,柴建云,王祥珩.变速恒频双馈风力发电系统交流励磁综述.电力系统自动化,2004,28(23):92-96
[6]康红霞,姚兴佳.变速恒频风电系统电机直接转矩控制策略.可再生能源,2006,4:91-93
[7]付海涛.变速恒频风力发电系统的建模与仿真研究.硕士学位论文.华中科技大学,2005
作者简介:
陈宇(1983-),男,博士研究生,研究方向为电力电子装置与控制技术;
罗昉(1980-),男,博士研究生,研究方向为综合电力系统;
康勇(1965-),男,博士,教授,博士生导师,主要研究方向为电力系统继电保护及安全自动控制、光伏、风力发电及电力电子应用技术。
W1WW_P4LCJS_COM-PLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
ABSTRACT: In this paper, the direct power control method (DPC) on the variable speed constant frequency (VSCF) wind power generation system was investigated. First of all the DPC scheme was analyzed; then the conclusion that base on MT-reference frame was extend to the actual system; at last, a simulation of a actual system was build to validate the feasibility and validity of the DPC scheme.
——可——编——程——控-制-器-技——术——门——户
KEYWORDS: VSCF; doubly-fed induction generator; direct power control; simulation
WWW_PLCJS@_COM%-PLC-技.术_网
摘要:本文对变速恒频发电系统的直接功率控制策略进行了研究与仿真。首先对直接功率控制原理进行理论分析;然后将MT坐标系下得出的结论推广到实际系统中;最后建立了实际系统的仿真模型,对直接功率控制策略的可行性和有效性进行仿真验证。
WWW_PL※CJS_COM-PLC-技.术_网
关键词:变速恒频;双馈电机;直接功率控制; Matlab仿真
WWW.PLCJS.COM——可编程控制器技术门户
WWcW_PLCJS_COM-PLC-技.术_网
1 引言
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
目前对双馈发电系统的控制,通常采用定子磁场定向的控制方式,即通过坐标变换把电机的电量转化到MT坐标轴上,实现对输出功率的有功无功解耦,通过调节转子电流的M轴与T轴分量来分别调控电机送出的无功与有功。这样做的优点是有功与无功可以精确调节,但是由于励磁变换器通常是电压源型变换器[1],所以还需要将转子电流指令变成转子电压指令,这在个过程中又会引入耦合,需要加入额外的补偿指令,运算变得复杂[2]。
WWW_PLC※JS_COM-PmLC-技.术_网
直接功率控制与上述矢量控制不同,它并不以控制转子电流为目标,而是通过控制转子磁链的大小和相位,直接对输出的有功无功进行调控。与异步电机的直接转矩控制相似,直接功率控制的本质是一种标量控制,它允许有功与无功在一定的容差范围内变化,避免了矢量控制中复杂的坐标变换和补偿调节,控制指令简单直接,易于实现。本文将对直接功率控制策略进行研究与仿真。
WWW_PLC※JS_COM-PmLC-技.术_网
plcjs.技.术_网
2 直接功率控制的基本原理
WWW_P※LCJS_CO※M-PLC-技-.术_网
受到鼠笼型异步电机直接转矩控制的启发,有学者提出了变速恒频双馈风力发电系统的直接功率控制[3]。其控制原理可由图2.1所示的矢量图来说明。
WWW_PLC※JS_COM-PmLC-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
P.L.C.技.术.网——可编程控制器技术门户
当采用定子磁链矢量定向后,转子的T轴分量只影响发电机的有功功率,而M轴分量只影响发电机的无功功率[4]。以次同步速运行为例,在图2.1(a)中,令转子电流分量iMr=0,转子电流分量iTr从0增加到满载,转子磁链的轨迹由B到A,此时转子磁链与定子磁链之间的角度变化,而转子磁链的幅值基本不变。在图1.1(b)中,令转子电流分量iTr为常数,电流分量iMr从0增加到额定值时,转子磁链的轨迹由C到D,此时转子磁链幅值变化,而转子磁链与定子磁链之间的角度基本不变[5]。
WW.W_PLC※JS_C,OM-PL,C-技.术_网
图2.2 (a)是在MT坐标系下,某一输入条件下仿真计算所得的有功无功输出波形,图2.2 (b)是同一条件下转子磁链与定子磁链夹角与幅值波形,由图可知,转子磁链相角与幅值的变化,基本上对应于有功功率与无功功率的变化。
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
WW.W_PLCJS_COM-PLC-技.术_网
P.L.C.技.术.网——可编程控制器技术门户
由上述理论分析与仿真均可知,在MT坐标系统上,转子电流iTr变化,则定子侧的有功功率变化,同时转子磁链矢量和定子磁链矢量的夹角亦随之变化;转子电流iMr变化,则定子侧的无功功率变化,同时转子磁链的幅值亦随之变化。因此,可以通过控制转子磁链矢量的角度和幅值来实现有功无功的调控。
plcjs.技.术_网
WWW_P※LCJS_COM-PLC-)技.术_网
3 直接功率控制的实施方法
WWW_PLC※JS_COM-PmLC-技.术_网
转子侧的变换器一般为电压源型变换器,能控制的电量是转子侧电压。为了实现直接功率控制,必须分析转子侧变频器输出的电压在次同步速和超同步速运行状态对转子磁链矢量相位和幅值的影响,才能对电机定子有功功率和无功功率实施有效的控制。仍以次同步速运行状态为例分析转子电压对转子磁链的影响。
WW.W_PLC※JS_C,OM-PL,C-技.术_网
在MT坐标系统里,忽略转子电阻压降后,转子侧有关系式(3-1);两边求积分后,式(3-1)可以化为(3-2):
WWW.PLCJS.COM——可编程控制器技术门户
WWW_PLCJS@_COM%-PLC-技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
由式(3-2)可知,在一个极短的时间内,转子磁链MT分量的变化,主要由两项分量引起,分别是同轴的电压分量与异轴的磁链分量。在实际中,由于电压分量远远大于磁链分量,所以电压分量对磁链产生主要影响,其变化的方向与电压方向相同。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
另外,从空间矢量的角度分析,也可以得到相同的结论。转子侧的相量表达式为式(3-3)[6];由于转子侧的输入电压远大于电阻上的压降,所以当忽略转子电阻上的压降项后,有式(3-4):
WWW_PLC※JS_COM-PmLC-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
由式(3-4)可知,在一个极短的时间段内,作用某一电压矢量后所产生的转子磁链矢量的改变量与该电压矢量具有相同的方向。这就为在实际系统中如何利用电压控制转子磁链提供了理论依据。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
4直接功率控制的坐标变换
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
上述直接功率控制理论是在MT坐标系统中进行分析的,而实际上对双馈发电机的控制是在转子侧进行的。因此,在实际的系统中,还需要加入坐标变换与反变换的模块,才能对电机实现有效的控制。
——可——编——程——控-制-器-技——术——门——户
为了取得转子磁链幅值与角度,需要由从电机的可用电量中构造出转子磁链来。转子磁链可以由定子电压与电子电流经过运算得到的。由文献[7]可以得到在MT定向下定子电流与转子电流的关系式(4-1),转子电流与转子磁链的关系式(4-2):
WWW_PL※CJS_COM-PLC-技.术_网
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
由上述两式可知,为了计算转子磁链,首先必须计算出定子电流的MT分量。以双馈电机运行于次同步速为例,此时电机各量的相量关系如图4.1所示。
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
WW.W_PLCJS_COM-PLC-技.术_网
图4.1 电机各量的相量关系图
——可——编——程——控-制-器-技——术——门——户
由相量图的位置关系,首先利用3s/2s变换计算出定子三相电压与定子三相电流相对于定子a相的夹角,两者之差即为定子电压相量与电流相量的夹角。又由于在忽略定子电阻后,M轴滞后Us90o,故用此角度加上90o就得到了定子电流相对于M轴的夹角,用此夹角就可以计算出定子电流的MT分量,进而计 算出转子电流与转子磁链。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
在转子侧,施加到转子上的六个电压矢量是以转子a相轴线为基准的,而由上面构造的转子磁链观测器却是以M轴定向的,因此还要把MT分量转化到转子三相坐标系下,转子侧变换器才能对转子磁链实施有效的控制。由图4.1可知,在任意时刻,转子与定子电压矢量的角度差为 ,同时又由于M轴滞后定子电压矢量90o,故M轴与转子a相轴线的夹角为 。这就是MT坐标系与转子三相坐标系的转换依据。
P.L.C.技.术.网——可编程控制器技术门户
当求得转子磁链在转子三相坐标系中的幅值与夹角后,就可以对电机实施直接功率控制。如图4.2所示,设在某一时刻,输出有功功率大于容许范围,无功功率小于容许范围,则由上节的分析可知,转子磁链夹角要减小,而转子磁链的幅值要增大。若此时转子磁链处于图中的扇区,向转子施加电压矢量U1可以达到控制要求。同理,U6作用时,可以使转子磁链与定子磁链夹角增加且转子磁链的幅值增加,因此U6可以增大输出有功并且增大输出无功。将转子磁链在每一个扇区的情况一一列举,制成控制表,
WWW_PLC※JS_COM-PmLC-技.术_网
WWW_PLCJS_COM-PLC-技.术_网
图4.2 转子侧电压矢量示意图 依滞环比较器的输出状态与转子所在扇区实时查表,决定逆变器的输出,从而实现直接功率控制。
plcjs.技.术_网
5 直接功率控制的系统仿真
P.L.C.技.术.网——可编程控制器技术门户
实际系统中的直接功率控制的实现与直接转矩控制相似,有功功率和无功功率分别由两个砰-砰控制器将检测值与给定值进行滞环比较,依据输出量查表,确定转子变频器的开关状态,从而实现双馈电机的直接功率控制。
WWW_P※LCJS_CO※M-PLC-技-.术_网
WWW_PL※CJS_COM-PLC-技.术_网
图5.1 直接功率控制的双馈发电系统仿真模型
WWW_P※LCJS_COM-PLC-)技.术_网
图5.1是由上述理论构造的直接功率控制的双馈发电系统仿真模块。仿真选用的参数为:双馈电机参数Rs=0.4Ω,Rr=0.8Ω,Ls=71.31mL,Lr=71.31mL,Lm=69.31mL,仿真在双馈电机定子输入220V50Hz三相交流电压、输入机械转矩20N?m、逆变器直流输入电压330V、有功给定初值10kW,在0.7秒时突变为20kW、无功给定初值为0VA,在0.5秒时突变为10kVA、滞环比较器容差为100的条件下进行,以验证直接功率控制的控制效果与瞬态响应能力。
WWW_P※LCJS_COM-PLC-)技.术_网
仿真系统中,PQ-power模块计算出实际输出的有功与无功,与给定的有功无功指令进行比较,其误差进入滞环比较器,滞环比较器的输出送入表格模块。另一方面,磁链观测器计算出转子磁链在MT坐标系的位置,坐标变换模块把转子磁链转化到转子侧三相旋转坐标系中来,得到转子磁链关于转子a相轴线的夹角,扇区判断则判别转子磁链位于哪一个扇区。以扇区编号和滞环比较器的输出作为依据查表,就可以得到应输出的电压矢量指令,这个电压指令送入电压源型逆变器,逆变器输出六个基本电压矢量中的一个,对双馈电机进行控制。
WWW_PLCJS@_COM%-PLC-技.术_网
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
由图可知,有功与无功以指定值为中心,在容差所设定的范围内波动,这是直接功率控制的滞环调节器在产生作用。由图还可以看出,在给定值突变时,有功无功的实际值均迅速地跟踪指定值,几乎不需要调节过程。
WWW_PLC※JS_COM-PmLC-技.术_网
图5.4与图5.5分别是有功与无功给定突变前后输出电压与输出电流的波形。从电流波形可以看出,有功变化时电流幅值变化,无功变化时电流相位变化。由图还可以看出,输出电流具有良好的正弦度,但电流上有许多细小的纹波。这是容差允许误差下产生的,在开关损耗允许的前提下,滞环容差越小,则开关频率越高,纹波的频率越高,电流的波形越好。
WW.W_PLCJS_COM-PLC-技.术_网
由理论与仿真可知,直接功率控制下,较之矢量控制,直接功率控制的控制更为简单,输出电流的瞬态响应更为迅速。在实际的变速恒频发电系统中,直接功率控制是有效可行的。
WWW_PL※CJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
6 结论
WWW.PLCJS.COM——可编程控制器技术门户
本文首先在MT坐标系里对直接功率控制的原理进行了分析研究,得出了输出功率与转子磁链之间的对应关系,然后分析转子电压来与转子磁链的关系,得出可以通过转子电压来影响转子磁链的结论,并将结论通过坐标变换推广到实际电机的三相系统中来。本文的最后进行了实际系统的仿真,证明了在实际系统中,直接功率控制是有效可行的。
WWW.PLCJS.COM——可编程控制器技术门户
W1WW_P4LCJS_COM-PLC-技.术_网
参考文献
WWW_PLCJS@_COM%-PLC-技.术_网
[1]贺益康,郑康,潘再平等.交流励磁变速恒频风电系统运行研究[J].电力系统自动化,2004,18(13):55-59
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
[2]Lei Y Z, Mullane A, Lightbody G.Modeling of The Wind Turbine with A Doubly Fed Induction Generator for Grid Integration Studies [J]. IEEE Transactions on Energy Conversion,Vol.21,No.1,2006,21(1):257-264
WWcW_PLCJS_COM-PLC-技.术_网
[3]Datta R, Ranganachan V T. Direct Power Control of Grid-connected Wound Rotor Induction Machine Without Rotor Position Sensors. IEEE Trans on Power Electronics, 2001, 16(3): 390-399
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
[4]相会杰,卞松江,吕晓美,郑洪涛.交流励磁变速恒频风力发电系统的实验.太阳能学报,2005,1226(6):773
WW.W_PLCJS_COM-PLC-技.术_网
[5]伍小杰,柴建云,王祥珩.变速恒频双馈风力发电系统交流励磁综述.电力系统自动化,2004,28(23):92-96
plcjs.技.术_网
[6]康红霞,姚兴佳.变速恒频风电系统电机直接转矩控制策略.可再生能源,2006,4:91-93
WWW_P※LCJS_CO※M-PLC-技-.术_网
[7]付海涛.变速恒频风力发电系统的建模与仿真研究.硕士学位论文.华中科技大学,2005
WWcW_PLCJS_COM-PLC-技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
作者简介:
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
陈宇(1983-),男,博士研究生,研究方向为电力电子装置与控制技术;
WWcW_PLCJS_COM-PLC-技.术_网
罗昉(1980-),男,博士研究生,研究方向为综合电力系统;
W1WW_P4LCJS_COM-PLC-技.术_网
康勇(1965-),男,博士,教授,博士生导师,主要研究方向为电力系统继电保护及安全自动控制、光伏、风力发电及电力电子应用技术。
WWW_P※LCJS_CO※M-PLC-技-.术_网
P.L.C.技.术.网——可编程控制器技术门户
本新闻共2页,当前在第1页1 2
WWW_PL※CJS_COM-PLC-技.术_网
上一篇: 变电站综合自动化技术的最新应用下一篇: PLC在火电厂化学补给水处理自动控制系统中应用说明
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行