模糊控制在大型风力发电机电控系统中应用的研究
日期:2009-4-13 23:41:34 来源:中国工控网
点击: 作者:
点击: 作者:
点击【 大 中 小 】放大字体.
关键词:模糊控制 变桨距 风力发电机 智能控制 仿真
1 引 言
对风力发电机进行调节常用的两种形式是失速调节和桨距调节,这两种方案都有不足之处,如:定桨距失速型调节风力发电机不能达到最大的效率。变桨距调节风力发电机在阵风情况下输出的波动较大。
变桨距失速调节方式则融合了两者的优点。变桨距失速型风力发电机叶片也是通过轴承固定在轮毂上,可以绕叶片的展向轴线转动调整桨距角度。在低风速时,可以通过调节桨距角来增大气流的攻角,使得输出功率达到该风速时的最大值。在额定风速以上时,通过增大桨距角来减小气流攻角,从而限制输出功率的过载,因此风力发电机的输出功率可以保持恒定。在阵风情况下,同失速调节叶片一样,叶尖刹车装置可以迅速制动叶轮。刹车时,叶片转动,相当于气体刹车,减少了机械刹车对传动系统的冲击,同时减轻了刹车结构的负荷。
目前由于变桨距风力发电机很少,所以风力发电机系统一般采用开环控制,极少数使用PID调节器来控制,风力发电机系统是一个高阶、非线性、强耦合、多变量时变的系统。用开环控制或常规的PID控制很难满足要求。因此我们设计了一种新的模糊控制器来控制该风力发电机系统。
2 模糊控制算法的设计
风力发电机的模糊控制规则的设计:
设输出功率的误差为E,误差的变化为EC,桨距角的变化为U,假定选取E的语言变量的词集均为
{NB,NM,NS,NO,PO,PS,PM,PB}
选取EC及U的语言变量词集为
{NB,NM,NS,O,PS,PM,PB}
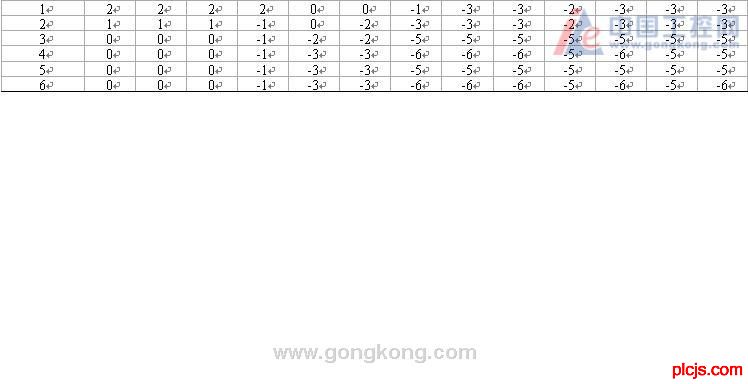
模糊控制状态表如表1所示:

3 基本模糊查询表的建立

4 模糊控制器与风力发电机连接后的仿真
图1 是采用模糊控制器的风力发电机的仿真结构图。
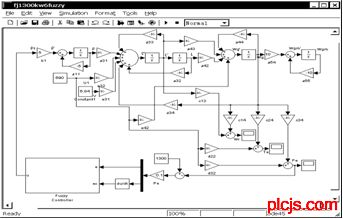
图1 采用模糊控制器的风力发电机模型结构图
5 仿真结果
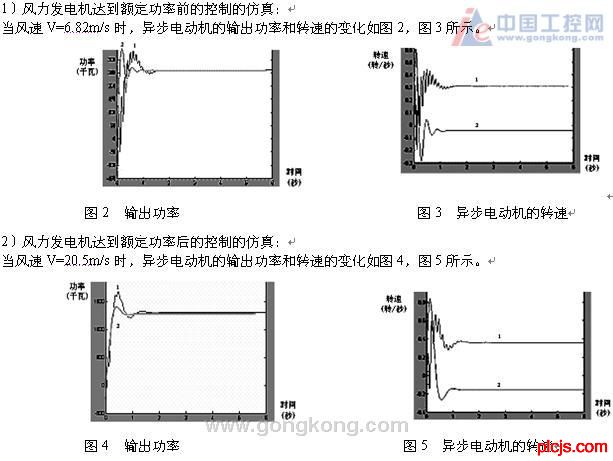
以下是采用常规PID控制器(曲线1)与模糊控制器(曲线2)的仿真结果比较,
3)抗干扰性的仿真:(本仿真采用风速V=6.82米时突加阶跃干扰的仿真,其他风速类似).
当风速V=6.82m/s时,系统进入稳态工作区后,3秒钟时,风速由6.82m/s时突然跳变到7.7m/s时,这时由于测风仪还没有确定风速是否稳定在7.7m/s(测风仪一般取10分钟内的平均值),所以对此时的系统而言,该风速的变化是干扰输入。图6,图7是该系统对此干扰的仿真:

模糊控制器具有非线性PD控制规律,从而有利于保证系统的稳定性,并可提高系统快速性以及消弱其振荡现象,仿真结果说明了这一点。
从图中可以看出,在时间T=3 s时,系统有微小的波动,然后很快达到稳态,可见系统有很好的抗干扰性。
6 结 论
从以上仿真结果可以看出,不论是跟随性能还是抗干扰性能,采用模糊控制器都比采用PID控制器效果好的多,即更能有效的减少振荡,且能较快的达到稳态。这是因为PID控制器过分依赖于控制对象的模型参数、理论推导假设条件太严格。对于模型参数大范围变化、非线性、多变量的系统,难以满足要求。而模糊控制器不依赖控制对象的数学模型,便于利用人的经验知识,能够很好地克服被控系统中模型参数变化和非线性等不确定因素,所以鲁棒性强、稳态精度高。
参考文献
〔1〕 Anca D. Hansen, Henrik Bindner and Anders Rebsdorf. Improving Transition Between Power Optimization And Power Limitation Of Variable Speed/Variable Pitch Wind Turbines. European Wind Energy Conference,1-5 March 1999, Nice France pp889-892.
〔2〕 周箴,赵金,万淑芸,王离九.模糊单神经元混合控制在交流传动系统中的应用.电气传动,1998,第1期,21~23
〔3〕 薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用.北京:清华大学出版社,2002
〔4〕 肖劲松,倪维斗,姜桐.大型风力发电机组的建模与仿真.太阳能学报,1997,18(2):118~127
P.L.C.技.术.网——可编程控制器技术门户
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
关键词:模糊控制 变桨距 风力发电机 智能控制 仿真
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
1 引 言
plcjs.技.术_网
对风力发电机进行调节常用的两种形式是失速调节和桨距调节,这两种方案都有不足之处,如:定桨距失速型调节风力发电机不能达到最大的效率。变桨距调节风力发电机在阵风情况下输出的波动较大。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
变桨距失速调节方式则融合了两者的优点。变桨距失速型风力发电机叶片也是通过轴承固定在轮毂上,可以绕叶片的展向轴线转动调整桨距角度。在低风速时,可以通过调节桨距角来增大气流的攻角,使得输出功率达到该风速时的最大值。在额定风速以上时,通过增大桨距角来减小气流攻角,从而限制输出功率的过载,因此风力发电机的输出功率可以保持恒定。在阵风情况下,同失速调节叶片一样,叶尖刹车装置可以迅速制动叶轮。刹车时,叶片转动,相当于气体刹车,减少了机械刹车对传动系统的冲击,同时减轻了刹车结构的负荷。
WWW_PLCJS_COM-PLC-技.术_网
目前由于变桨距风力发电机很少,所以风力发电机系统一般采用开环控制,极少数使用PID调节器来控制,风力发电机系统是一个高阶、非线性、强耦合、多变量时变的系统。用开环控制或常规的PID控制很难满足要求。因此我们设计了一种新的模糊控制器来控制该风力发电机系统。
P.L.C.技.术.网——可编程控制器技术门户
WWW.PLCJS.COM——可编程控制器技术门户
2 模糊控制算法的设计
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
风力发电机的模糊控制规则的设计:
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
设输出功率的误差为E,误差的变化为EC,桨距角的变化为U,假定选取E的语言变量的词集均为
WWW_P※LCJS_COM-PLC-)技.术_网
{NB,NM,NS,NO,PO,PS,PM,PB}
WWW_PLC※JS_COM-PmLC-技.术_网
选取EC及U的语言变量词集为
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
{NB,NM,NS,O,PS,PM,PB}
WW.W_PLC※JS_C,OM-PL,C-技.术_网
模糊控制状态表如表1所示:
WWW_PLCJS@_COM%-PLC-技.术_网
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
3 基本模糊查询表的建立
WWcW_PLCJS_COM-PLC-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
WWW_PLCJS@_COM%-PLC-技.术_网
4 模糊控制器与风力发电机连接后的仿真
WWW_P※LCJS_COM-PLC-)技.术_网
图1 是采用模糊控制器的风力发电机的仿真结构图。
plcjs.技.术_网
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
图1 采用模糊控制器的风力发电机模型结构图
P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户
P.L.C.技.术.网——可编程控制器技术门户
5 仿真结果
WWcW_PLCJS_COM-PLC-技.术_网
以下是采用常规PID控制器(曲线1)与模糊控制器(曲线2)的仿真结果比较,
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_PLC※JS_COM-PmLC-技.术_网
WWcW_PLCJS_COM-PLC-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
3)抗干扰性的仿真:(本仿真采用风速V=6.82米时突加阶跃干扰的仿真,其他风速类似).
WWW_P※LCJS_COM-PLC-)技.术_网
当风速V=6.82m/s时,系统进入稳态工作区后,3秒钟时,风速由6.82m/s时突然跳变到7.7m/s时,这时由于测风仪还没有确定风速是否稳定在7.7m/s(测风仪一般取10分钟内的平均值),所以对此时的系统而言,该风速的变化是干扰输入。图6,图7是该系统对此干扰的仿真:
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
模糊控制器具有非线性PD控制规律,从而有利于保证系统的稳定性,并可提高系统快速性以及消弱其振荡现象,仿真结果说明了这一点。
WWW_PLC※JS_COM-PmLC-技.术_网
从图中可以看出,在时间T=3 s时,系统有微小的波动,然后很快达到稳态,可见系统有很好的抗干扰性。
WWW_PL※CJS_COM-PLC-技.术_网
WWW_P※LCJS_COM-PLC-)技.术_网
6 结 论
WWW_PLCJS_COM-PLC-技.术_网
从以上仿真结果可以看出,不论是跟随性能还是抗干扰性能,采用模糊控制器都比采用PID控制器效果好的多,即更能有效的减少振荡,且能较快的达到稳态。这是因为PID控制器过分依赖于控制对象的模型参数、理论推导假设条件太严格。对于模型参数大范围变化、非线性、多变量的系统,难以满足要求。而模糊控制器不依赖控制对象的数学模型,便于利用人的经验知识,能够很好地克服被控系统中模型参数变化和非线性等不确定因素,所以鲁棒性强、稳态精度高。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WW.W_PLCJS_COM-PLC-技.术_网
参考文献
WWW_PLCJS@_COM%-PLC-技.术_网
〔1〕 Anca D. Hansen, Henrik Bindner and Anders Rebsdorf. Improving Transition Between Power Optimization And Power Limitation Of Variable Speed/Variable Pitch Wind Turbines. European Wind Energy Conference,1-5 March 1999, Nice France pp889-892.
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
〔2〕 周箴,赵金,万淑芸,王离九.模糊单神经元混合控制在交流传动系统中的应用.电气传动,1998,第1期,21~23
WW.W_PLC※JS_C,OM-PL,C-技.术_网
〔3〕 薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用.北京:清华大学出版社,2002
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
〔4〕 肖劲松,倪维斗,姜桐.大型风力发电机组的建模与仿真.太阳能学报,1997,18(2):118~127
WWW_PLCJS@_COM%-PLC-技.术_网
WWW_PLC※JS_COM-PmLC-技.术_网
WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户)
plcjs.技.术_网
上一篇: 电力线载波应用特点下一篇: 小电流接地电网改进能量法接地选线原理
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行