点击: 作者:未知
大卫·汉森(David Hanson)做了一些其他机器人制造者不愿做的事。他创造的机器人能够模仿真人面部表情和面部动作。这听上去可能并不是一个新奇的想法,但事实上它的确如此。
绝大多数机器人,虽具有人工智能,可以完成一些类似人类的动作,但是它们的面部表情仍然很呆板。原因之一是,在机器人制造领域,人们普遍认为机器人只是对人的面部表情的模仿。“我完全不赞同这一观点,我们被逼真的表情和手势所吸引,”大卫-汉森机器人公司总裁汉森表示。
另一个原因是如何解决制造人工智能驱动运动控制系统的重大技术难题,这个系统基于语音和机器视觉输入,能可靠地模拟真人面部的48个主要肌肉群。“机器人不只是要会表达,更要学会在恰当的时间作出恰当表达,”汉森说,例如基于眼睛接触的面部表情,必须在1/3秒内作出反应,这样看上去才更真实。

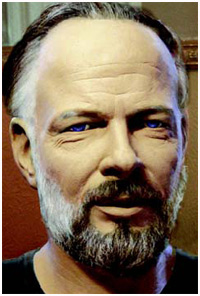
菲利浦·狄克机器人真的很像已故科幻小说家,就连声音都像。机器人人工智能的个性与他的作品主题相吻合,还有视觉系统和语音识别系统,这保证了机器人可以模仿人类的交谈行为--包括人员识别能力,表情观察,以及进行简单的对话。
汉森之前在罗德岛设计学院(Rhode Island S
艺术性是显而易见的。汉森制造的机器人的头部,可模仿包括艾伯特·爱因斯坦(Albert Einstein)和作家菲利浦·狄克(Philip K. Dick)等著名人物,可以明显地表现出数以千计的细微、可信的面部表情。“我们中很多人刻意避免将机器人制造的太像真人,但大卫却与众不同,因为他太专注于研究人类面部细节,”麻省理工学院(MIT)计算机科学与人工智能实验室研究员,亚伦·艾德辛格(Aaron Edsinger)如是说。他也是这类机器人的合作制造者之一。
从工程学的角度看,汉森的机器人是对如何创造低功耗、紧凑型运动控制系统的研究。以他的爱因斯坦(Einstein)机器人头部为例,是由33个伺服马达和关节组成,仅仅需要6V电源提供10W电力来实现其全部面部动作。所需能量很小,仅需要8节AA电池。据汉森说,其他“富有表情的机器人”,指的不是在主题公园和众多电影布景中见到的那种“哑巴”无生命仿人形机器人,这种机器人通常都需要3kW的电源供电,而且还要有一个电压范围,另外还需要气流系统或流压流体存储器。“在爱因斯坦表情机器人制造之前,具有复杂表情表现能力的机器人都需要辅助系统,”他说。
同时,如果仿人机器人被纳入汉森称之的“机器人革命”,自我包容就关系到很多的事情。机器人在未来几年里似乎更有可能融入到我们的日常生活中,国际机器人联合会公布的2006年世界机器人研究报告中预测,新型家用机器人,包括吸尘器机器人和剪草机器人的数量在2009年将达390万台。研究还表示,到2009年将有160万台新娱乐休闲机器人进入家庭。

汉森的最知名智能机器人之一是爱因斯坦的头部,这里放在一个双足机器人身体上进行展示,身体与头部不是很契合。
汉森希望能够至少制造出一部分这些新型机器人。到目前为止,他已经将几台这类价格昂贵的定制机器人成功销售给了博物馆、娱乐场所、科研实验室,其中一些价值超过13万美元。例如,美国宇航局喷气推进实验室(NASAs Jet Propulsion Lab),就购买了这样一台机器人。库珀-休伊特博物馆(Cooper-Hewitt Museum),去年12月也安装了一台新版本的爱因斯坦机器人,将其作为美国国家设计三年展(National Design Triennial)的一部分。但是,在未来几个月,汉森将致力于把这种双足机器人推向消费市场。
与日本著名机器人制造者高桥智隆(Tomotaka Takahashi)合作,这些新的RoboKind机器人将会有14英寸高,其中机器人身体部分由高桥设计,而头部则由汉森设计。这些卡通型机器人不仅可以到处走动,而且还具有丰富的面部表情。“双足机器人在日本并不罕见,有些机器人还能参加足球赛,”汉森说,“但我们的新型机器人将是唯一具有复杂面部表情的机器人。”汉森称限量版新型机器人售价大约为1万美元,同时标准模型成本大约3000美元,另将还会有一个简化版、价值300美元的模型。
所有汉森机器人,无论是用在博物馆中或家庭,都有一些关键技术。那些引人注目的技术都与汉森的人工智能方法有关——尤其是那些基于会话交流而产生另人难以置信面部表情的方式。菲利浦·狄克机器人甚至由于其人工智能而获得了美国协会的奖励。
汉森将很快推出一种新的、消费者关注的机器人,这种机器人是与日本的
RoboGarage 公司一起开发的。价格约在3000~10000 美元之间,机器人是一
个具有14 英寸高的双足机器人,具有丰富的面部表情。汉森还计划推出面部表
情动作较少的约300 美元的机器人。这里是汉森早期绘制人物概念草图之一。
汉森在机械上的创新给那些需要设计紧凑、高效率运动系统的工程师们提供了一个借鉴。“如果想要把机器人融入到我们生活中,降低机器人能耗就显得非常重要,”汉森表示,“可惜,在现有驱动技术水平上,降低能耗还没有更多简便方法。”但是汉森想出了几种方法。让我们来了解这些方法。
皮肤秘密
要了解汉森机器人是如何工作的,最好先了解其皮肤。选择皮肤材料并不仅仅是为了外表装饰。汉森发明了“Frubber”,一种具有专利的硅橡胶弹性体,其机械性能影响着每一个机器人全部运动
控制系统的设计。
按照汉森的说法,Frubber是一种发泡的、铂基弹性体,这种弹性体容积中70%是空气。发泡弹性体在工业中使用很普遍。虽然,使Frubber分离的是汉森所称之的“孔结构”。他发明了一种特别的加工方法和弹性体化学属性,这些使得他可以控制发泡的大小、分布、气囊的形状、气泡容积,气泡容积分布范围从1微米到几毫米。汉森说,这样的尺寸分布允许一定容积泡沫包含有更多的空气
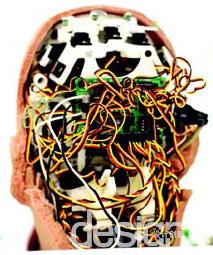
爱因斯坦机器人头部充满电线和马达。汉森在1 年半前开始研制第一代爱因斯坦机器人模型,但从那时起,他已经简化了机器人头部33个侍服马达的布局,以便每一个马达都能够由一个抽取式面板进行控制。

汉森机器人面部采用刚硬头骨底层,这不仅能将全部马达包括进去,还为头部内关节提供定位点,以便驱动机器人的弹性体皮肤。
这种内有空气的材料运动时有一点像“人的脸部组织,”汉森说,它不需太大力量就可移动。泡沫型弹性体仅拥有相同体积实体弹性体质量的30%。“所以你就会立刻希望使泡沫型弹性体发生变形只需实体弹性体变形能耗的30%,”汉森说,但实际上它发生变形所需的能量更少,即不到30%。
通过显微镜观察,当弹性体材料拉长时,该材料会呈现出手风琴状气囊结构。汉森说在相等拉长下,典型Frubber所需力量是实体所需力量的1/10。同样,在相同的压缩尺寸下,Frubber所需的力量是实体所需力量的1/13--当压力稍高就返回到手风琴状气囊的崩溃状态。汉森说弹性体材料能够经受数万次交互循环,其伸长率可能达到900%,尽管该材料的弹性体气囊壁可能在开始时就损坏了450%。
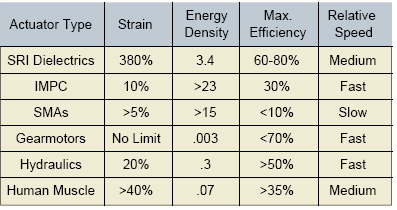
目前还没有能够将张力、速度和能量密度联系在一起来真实模仿人类肌肉的驱动
技术马达。在更好的驱动器出现之前,汉森已经找到使马达可以运转的办法。
Frubber仅需要极小的力就能产生形变的特点对于运动系统的其他部位有非常重要的好处。“变形力越少,需要的马达和联接就越小,这减少了能量需求,”汉森说。“Frubber使一切成为可能。”
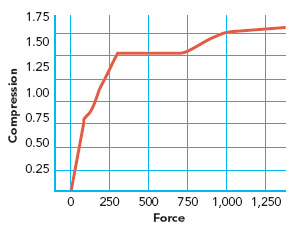
压缩Frubber只需要一点点力就可以,用一种泡沫硅弹性体做机器人皮肤。
作为回报,低驱动力使汉森可采用小马达并保持所需动力最小。
美国宇航局喷气推进实验室资深研究科学家、先进技术研究组负责人约瑟夫·巴科恩(Yoseph Bar-Cohen)博士对此也有相同的看法。巴科恩是人造肌肉研究方面的开拓者,他在喷气推进实验室的非破坏性评估与推进加速器(NDEAA)上安装了一个汉森机器人头。
这些例子显示出了活动中的类人机器人原型。聚合体创新使得皮肤拥有更好的收缩和聚束情形,同时消耗非常少的电量,采用电池就可使轻量级机器人行走。
大卫·汉森的视频礼貌
巴科恩计划以机器人头为平台开发各种基于电活性聚合物的人造肌肉,目前仍有一些力量和速度限制。“大卫的机器人需要很少的驱动力和电能,这样机器人很完美,”他说。“如果说存在针对机器人的人造肌肉的合适测试平台,那这种机器人就是一个合适平台。”巴科恩说,虽然他又补充表示,“要真正利用电活性聚合物来驱动机器人,还有一些工作要做。”
驱动
即使采用Frubber有助于减少机器人的驱动力,汉森仍坚持开发出针对每个机器人人工智能软件输入量,而作出反应并展示出面部表情的驱动器,这种人工智能软件是基于语音识别、机器视觉,甚至面部识别的软件。“我认为面部表情是一个四维雕塑,”汉森说。
在那时维数可能无变化。为什么其他机器人制造者必须考虑在零点几秒钟内关闭控制系统?其实,汉森是在不同速度下关闭不同回路,这取决于机器人的任务。“对于人脸识别任务,机器人可能需略加思考,也许需要一秒钟,并不会看上去不自然,”他说。然而为了保持眼睛接触,达到象人一样的速度,控制系统要在20~30ms内关闭。“这大大快于反应时间”,他说。
为了驱动这些机器人,汉森采用了小型伺服马达——而且相当多。现在版本的爱因斯坦机器人有33个不同的伺服马达,约有一半的伺服马达可以
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!