基于AMEsim的液压挖掘机运动及控制仿真
日期:2009-4-21 21:54:11 来源:中国工控网
点击: 作者:
点击: 作者:
点击【 大 中 小 】放大字体.
摘要:运用法国AMESim软件平台对液压挖掘机的工作装置进行了建模,通过设置主要参数,实现了其机电液一体化系统的运动仿真,通过对动臂液压缸、斗杆液压缸、铲斗液压缸采用PID控制使其能够自动地实现较精确的轨迹跟踪完成自动挖掘,为设计人员提供了一条有效的设计手段。
液压挖掘机是结构最复杂、用途最广的工程机械之一,它在工业与民用建筑、水利电力工程、矿山采掘以及军事工程等施工中起着极为重要的作用。随着工程机械机器人化的研究发展,液压挖掘机的自动化也逐渐成为各国的研究重点,尤其是局部自动化,在这方面的研究中,多数工作集中在对挖掘机的工作装置进行控制。目前国内外对于挖掘机工作装置控制的研究中,通常把其工作装置作为多自由度的机器手来处理,控制工作装置的末端(即铲斗尖)以跟踪规划好的期望轨迹,期望轨迹就被称为铲斗轨迹控制中的目标值;如:自动挖掘,自动装载等[1]。因此本文着重点就是对定点挖掘过程中的挖掘机机电液一体化系统进行运动仿真并通过采用PID控制器以更好地跟踪期望轨迹实现自动挖掘。
挖掘机液压系统是由多个液压元件组成的复杂非线性系统,各液压元件间依靠液压介质进行能量的传递,同时依靠控制系统传递的控制信号实现压力、流量的控制。对挖掘机这样的复杂系统进行定性和定量的仿真,依靠传统的仅用微分和差分方程的方法是不能很好地模拟系统实际的各种工作性能,目前有的采用Matlab对挖掘机液压系统进行仿真[2]。有的采用Adams软件对其机构进行动力学仿真[3]。但是要对挖掘机这种复杂机电液一体化系统进行综合仿真(液压系统和各种控制系统及动力学联合仿真),仅采用Matlab或Adams软件是很难实现的,必须利用多个软件之间的接口进行联合仿真。而本文所采用的法国AMESim仿真软件正好适合对挖掘机进行机电液一体化系统的综合仿真。
1 挖掘机机电液系统的建模

挖掘机工作装置主要由动臂、斗杆和铲斗组成,其三者的协调运动是由3组液压缸的伸缩联动来实现。液压挖掘机采用3组液压缸,动臂液压缸Jack1、斗杆液压缸Jack2、铲斗液压缸Jack3,使铲斗实现平面运动,加上回转液压马达驱动转台运动,分别带动铲斗、动臂、斗杆及连杆一起转动使铲斗运动,从而满足挖掘作业要求见图1。经改造后,其工作装置的三节臂的驱动液压缸分别由一个三位四通的电比例阀控制,控制动臂液压缸的电比例阀Valve1、控制斗杆液压缸的电比例阀Valve2和控制铲斗液压缸的电比例阀Valve3,且液压缸上的位移传感器动态反馈各个液压缸活塞的瞬时位移,通过各自的PID控制器进行控制,因此能够实现对其运动进行精确控制,跟踪期望的运动轨迹。建模时需要输入各机构的位置坐标信息,本文通过三维UG软件进行建模然后读出各个机构的重心G位置和质量以及联接点Port的坐标值,限于篇幅只给出动臂Body1的各点坐标值(单位: m),重心G坐标(-2. 785,2. 148),port1坐标(2. 784,-2. 148),port2坐标(0. 277,0. 449),port3坐标(-0. 796,1. 239),port4坐标(-3. 931,0. 449),其中port1为动臂和机身联接点,port2为动臂和动臂液压缸Jack1联接点,port3为动臂和斗杆液压缸Jack2联接点,port4为动臂和斗杆联接点。
2 挖掘机机电液系统控制及优化
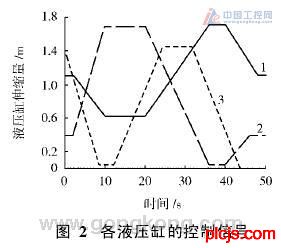
为了确定在挖掘过程中铲斗期望轨迹动所对应的动臂液压缸Jack1、斗杆液压缸Jack2、铲斗液压缸Jack3的控制信号,通过多次UG/motion模拟挖掘操作,并把该挖掘过程动作分解成每个液压缸的单独作用,然后记录下各个缸的运动规律,并在输入过程中线性化处理。最终所得到3个液压缸的控制信号见图2,其中曲线1表示动臂液压缸Jack1的控制信号,曲线2表示斗杆液压缸Jack2的控制信号,曲线3表示铲斗液压缸Jack3的控制信号。各液压缸为了实现期望运动规律,各自采用一个三位四通的电比例阀,通过PID控制器来跟踪各曲线运动。经过多次调整仿真最后得到一组比较理想的控制参数KP,KI,KD见表1。

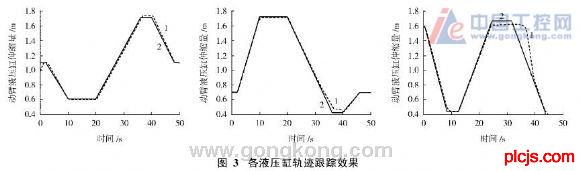
跟踪的效果见图3,最后通过AMESim软件的AMEAnimation模块模拟出挖掘机在PID控制下自动挖掘过程以验证设计质量见图4。
3结论
(1)运用法国AMESim仿真软件可以方便快捷地构建诸如液压挖掘机这类复杂的机电液一体化系统,通过改变设计参数,可以替代实物样机进行设计参数的测试评估,可缩短设计周期,避免重大设计错误,节省制造费用和时间,使开发成本大大降低。
(2)对挖掘机进行相关改造,采用电比例阀并通过PID控制来跟踪各液压缸的运动轨迹,跟踪效果良好,完成自动挖掘。
(3)本文的研究可推广到斜线挖掘和任意状态的工况,优化结果可用于挖掘机半自动化实时控制和轨迹规划。
WWW_P※LCJS_CO※M-PLC-技-.术_网
摘要:运用法国AMESim软件平台对液压挖掘机的工作装置进行了建模,通过设置主要参数,实现了其机电液一体化系统的运动仿真,通过对动臂液压缸、斗杆液压缸、铲斗液压缸采用PID控制使其能够自动地实现较精确的轨迹跟踪完成自动挖掘,为设计人员提供了一条有效的设计手段。
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
液压挖掘机是结构最复杂、用途最广的工程机械之一,它在工业与民用建筑、水利电力工程、矿山采掘以及军事工程等施工中起着极为重要的作用。随着工程机械机器人化的研究发展,液压挖掘机的自动化也逐渐成为各国的研究重点,尤其是局部自动化,在这方面的研究中,多数工作集中在对挖掘机的工作装置进行控制。目前国内外对于挖掘机工作装置控制的研究中,通常把其工作装置作为多自由度的机器手来处理,控制工作装置的末端(即铲斗尖)以跟踪规划好的期望轨迹,期望轨迹就被称为铲斗轨迹控制中的目标值;如:自动挖掘,自动装载等[1]。因此本文着重点就是对定点挖掘过程中的挖掘机机电液一体化系统进行运动仿真并通过采用PID控制器以更好地跟踪期望轨迹实现自动挖掘。
W1WW_P4LCJS_COM-PLC-技.术_网
挖掘机液压系统是由多个液压元件组成的复杂非线性系统,各液压元件间依靠液压介质进行能量的传递,同时依靠控制系统传递的控制信号实现压力、流量的控制。对挖掘机这样的复杂系统进行定性和定量的仿真,依靠传统的仅用微分和差分方程的方法是不能很好地模拟系统实际的各种工作性能,目前有的采用Matlab对挖掘机液压系统进行仿真[2]。有的采用Adams软件对其机构进行动力学仿真[3]。但是要对挖掘机这种复杂机电液一体化系统进行综合仿真(液压系统和各种控制系统及动力学联合仿真),仅采用Matlab或Adams软件是很难实现的,必须利用多个软件之间的接口进行联合仿真。而本文所采用的法国AMESim仿真软件正好适合对挖掘机进行机电液一体化系统的综合仿真。
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
1 挖掘机机电液系统的建模
WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户)
W1WW_P4LCJS_COM-PLC-技.术_网
WWW_P※LCJS_CO※M-PLC-技-.术_网
挖掘机工作装置主要由动臂、斗杆和铲斗组成,其三者的协调运动是由3组液压缸的伸缩联动来实现。液压挖掘机采用3组液压缸,动臂液压缸Jack1、斗杆液压缸Jack2、铲斗液压缸Jack3,使铲斗实现平面运动,加上回转液压马达驱动转台运动,分别带动铲斗、动臂、斗杆及连杆一起转动使铲斗运动,从而满足挖掘作业要求见图1。经改造后,其工作装置的三节臂的驱动液压缸分别由一个三位四通的电比例阀控制,控制动臂液压缸的电比例阀Valve1、控制斗杆液压缸的电比例阀Valve2和控制铲斗液压缸的电比例阀Valve3,且液压缸上的位移传感器动态反馈各个液压缸活塞的瞬时位移,通过各自的PID控制器进行控制,因此能够实现对其运动进行精确控制,跟踪期望的运动轨迹。建模时需要输入各机构的位置坐标信息,本文通过三维UG软件进行建模然后读出各个机构的重心G位置和质量以及联接点Port的坐标值,限于篇幅只给出动臂Body1的各点坐标值(单位: m),重心G坐标(-2. 785,2. 148),port1坐标(2. 784,-2. 148),port2坐标(0. 277,0. 449),port3坐标(-0. 796,1. 239),port4坐标(-3. 931,0. 449),其中port1为动臂和机身联接点,port2为动臂和动臂液压缸Jack1联接点,port3为动臂和斗杆液压缸Jack2联接点,port4为动臂和斗杆联接点。
P.L.C.技.术.网——可编程控制器技术门户
2 挖掘机机电液系统控制及优化
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
为了确定在挖掘过程中铲斗期望轨迹动所对应的动臂液压缸Jack1、斗杆液压缸Jack2、铲斗液压缸Jack3的控制信号,通过多次UG/motion模拟挖掘操作,并把该挖掘过程动作分解成每个液压缸的单独作用,然后记录下各个缸的运动规律,并在输入过程中线性化处理。最终所得到3个液压缸的控制信号见图2,其中曲线1表示动臂液压缸Jack1的控制信号,曲线2表示斗杆液压缸Jack2的控制信号,曲线3表示铲斗液压缸Jack3的控制信号。各液压缸为了实现期望运动规律,各自采用一个三位四通的电比例阀,通过PID控制器来跟踪各曲线运动。经过多次调整仿真最后得到一组比较理想的控制参数KP,KI,KD见表1。
WWW_PL※CJS_COM-PLC-技.术_网
——可——编——程——控-制-器-技——术——门——户
跟踪的效果见图3,最后通过AMESim软件的AMEAnimation模块模拟出挖掘机在PID控制下自动挖掘过程以验证设计质量见图4。
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
plcjs.技.术_网
3结论
WWW_PLC※JS_COM-PmLC-技.术_网
(1)运用法国AMESim仿真软件可以方便快捷地构建诸如液压挖掘机这类复杂的机电液一体化系统,通过改变设计参数,可以替代实物样机进行设计参数的测试评估,可缩短设计周期,避免重大设计错误,节省制造费用和时间,使开发成本大大降低。
WWW_P※LCJS_COM-PLC-)技.术_网
(2)对挖掘机进行相关改造,采用电比例阀并通过PID控制来跟踪各液压缸的运动轨迹,跟踪效果良好,完成自动挖掘。
WW.W_PLCJS_COM-PLC-技.术_网
(3)本文的研究可推广到斜线挖掘和任意状态的工况,优化结果可用于挖掘机半自动化实时控制和轨迹规划。
WWW_P※LCJS_COM-PLC-)技.术_网
WW.W_PLC※JS_C,OM-PL,C-技.术_网
WWW_PL※CJS_COM-PLC-技.术_网
WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户)
WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户)
WWW_P※LCJS_COM-PLC-)技.术_网
W1WW_P4LCJS_COM-PLC-技.术_网
WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户)
WWW_P※LCJS_CO※M-PLC-技-.术_网
WW.W_PLCJS_COM-PLC-技.术_网
上一篇: 轻轨精整PLC智能控制系统下一篇: 台达机电产品在精密带刀片皮机上的应用
评论内容
载入中...
载入中...
P
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!
·最新招聘信息
·最新求职信息
·推荐产品
·推荐厂商
·栏目热门排行
·站内热门排行