点击: 作者:未知
1 引言
电动汽车作为绿色交通工具,将在21世纪给人类社会带来巨大的变化。顺应当前国际科技发展的大趋势,将电动汽车作为中国进入21世纪汽车工业的切入点,不仅是实现中国汽车工业技术跨越式发展的战略抉择,同时也是实现中国汽车工业可持续发展的重要选择。
三菱公司的q系列plc是一种高性能、高稳定性的控制器,非常适合于应用于电动汽车控制系统中;三菱的cc-link总线是一种开放式的现场总线,通信速率高,将cc-link总线应用于电动汽车控制系统,易于实现控制的网络化、分散化,由软件逻辑替代传统的直接线束控制,可靠性是传统汽车控制系统的数十倍,同时可实现实时诊断、测试和报警功能,系统功能扩展不受限制。采用三菱q系列plc和cc-link总线的电动汽车控制系统将具有广阔的发展前景。
本文以whut-si型电动概念轿车为研究对象,建立了电动汽车控制系统和和控制模型。采用三菱q系列plc和cc-link总线技术,采用分散控制方式,将车内电器按功能和位置进行划分归类,通过集中控制主站、前控从站、后控从站、顶控从站和仪表从站五个控制单元连接车内各电器和仪表,各控制单元通过cc-link总线实现互连。
集中控制主站用于动力控制并与各从站控制单元通信,可以实现电动汽车的前进启动、倒车启动、刹车、调速和转向控制,并采用了保护装置确保电动汽车行驶安全。集中控制主站接收来自操作面板的信号,并将操作指令发送到各从站单元。
其余的车身电器通过从站控制单元来连接,前控从站连接的电器包括前左转向灯、前右转向灯、远光灯和近光灯,位于车身前部;后控从站连接的电器包括后左转向灯、后右转向灯和刹车灯,位于车身后部;顶控从站连接的电器包括车内音响、车内照明装置、车廓灯和车门锁;仪表从站主要用来连接各指示灯以及转速表和车速表。各控制单元都预留了4~6个i/o口线备用,便于系统扩展。
2 动力控制单元设计
在电动汽车控制模型中,采用了皮带轮传动方式,通过安装在直流电机上的主动轮的动力传输给安装在后轮轴上的从动轮。动力控制子系统主要实现前进、倒车功能和制动功能。
电动汽车的前进和倒车功能通过控制电机的正反来实现,采用直流接触器km1和km2实现电机极性的正反接,控制信号来自操作面板上的按钮sb1和sb2。接触器km1和km2选用了cz28型直流接触器,非常适合于应用在电动汽车动力控制单元中,能够实现直流电机的频繁启动,动态中分断,点动,反转及反接制动。
由于电动汽车是由电机带动固定于后轮间的齿形皮带轮来实现转动的,因此可以通过控制电机的停止来实现汽车的制动。为了确保行车安全,控制模型中设有三套制动系统,用以实现正常制动、紧急制动和冗余制动。制动控制系统结构如图1所示。
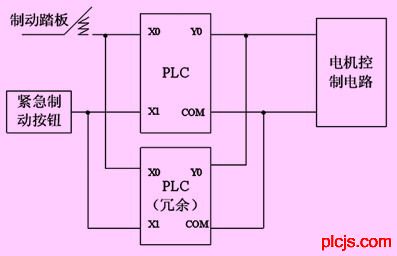
图1 制动控制系统结构图
正常制动通过检测对踏板施力的情况来决定制动的快慢,当踏板是缓慢的压下则plc的电流通过调速电路来实现汽车的降速;当踏板一次踩到底则plc先输出很小的电流通过调速电路先使电机待速转动,延时0.1秒后停车,这样即能控制在允许的刹车距离内停车又可以减少电机和皮带的磨损。紧急制动用以处理紧急交通意外情况,此时按操作面板上的紧急制动按扭,系统会通过plc立即将电机抱死,能够实现立即制动。备用制动通过冗余的正常制动来实现,一般情况下它处于断电状态,当电动汽车正常制动系统出现故障时,备用制动系统会立即启动,实现正常刹车,从而可以保障电动汽车行驶的安全。
3 调速控制单元设计
电动汽车调速控制单元系统由加速踏板、plc控制器、pwm调速系统、电动机、固定速比变速器和差速器以及车轮组成,如图2所示。
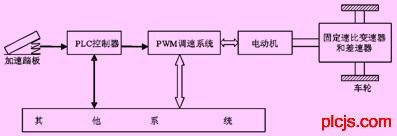
图2 电动汽车调速系统结构图
与燃料汽车一样,当驾驶员踩下加速踏板时,汽车相应地加速到需要的速度。只是电动汽车的加减速不是通过机械系统控制油门的通油量来实现,而是通过三菱plc控制器采集加速踏板的信号,经过处理后产生相应的二进制码,经数模转换器转换成电压信号发送给pwm产生电路,然后输出相应的脉冲占空比,从而实现了电机速度的调节,进而实现了车速的控制。
脉宽调制在输出电压每半个周期内,将输出电压的波形分成若干个脉冲波,由于输出电压的平均值与脉冲的占空比(脉冲的宽度除以脉冲的周期称为占空比)成正比,因此在调节脉冲宽度的同时,不改变脉冲电压幅度的大小和频率,而是改变脉冲的占空比,可以实现变频也变压的效果。pwm调制可以直接在逆变器中完成电压与频率的同时变化,控制电路比较简单。
直流电机驱动电路使用最广泛的就是h型全桥式电路,这种驱动电路可以很方便实现直流电机的四象限运行,分别对应正转、正转制动、反转、反转制动,其基本原理图如图3所示。
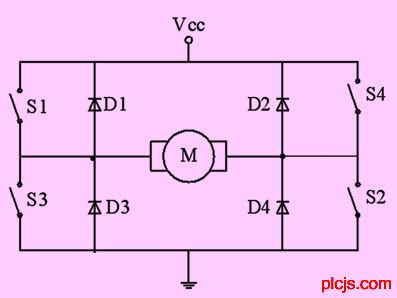
图3 h型桥式驱动电路
驱动电路中的四只开关管都工作在斩波状态,s1、s2为一组,s3、s4为另一组,两组的状态互补,一组导通则另一组必须关断。当s1、s2导通时,s3、s4关断,电机两端加正向电压,可以实现电机的正转或反转制动;当s3、s4导通时,s1、s2关断,电机两端为反向电压,电机反转或正转制动。
在电动汽车运动的过程中,有时需要使电机在四个象限之间切换,即在正转和反转之间切换,也就是在s1、s2导通且s3、s4关断,到s1、s2关断且s3、s4导通,这两种状态之间转换。在这种情况下,理论上要求两组控制信号完全互补,但是,由于实际的开关器件都存在开通和关断时间,绝对的互补控制逻辑必然导致上下桥臂直通短路,比如在上桥臂关断的过程中,下桥臂导通了。为了避免直通短路且保证各个开关动作之间的协同性和同步性,两组控制信号在理论上要求互为倒相的逻辑关系,而实际上却必须相差一个足够的死区时间,该矫正过程既可以通过硬件实现,即在上下桥臂的两组控制信号之间增加延时即可。
由于电机在正常工作时对电源的干扰很大,如果只用一组电源时会影响plc的正常工作,所以我们选用双电源供电。一组24v给plc和控制电路供电,另外一组24v给电机供电。在控制部分和电机驱动部分之间用光耦隔离,以免影响控制部分电源的品质,并在达林顿管的基极加三极管驱动,可以给达林顿管提供足够大的基极电流。系统电路结构如图4所示,驱动电机电路采用tip122集成电路。
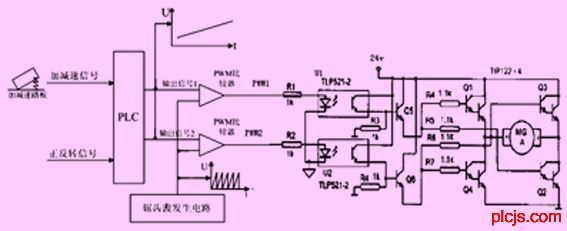
图4 pwm调速系统电路
pwm产生电路的动作特性如图5所示。
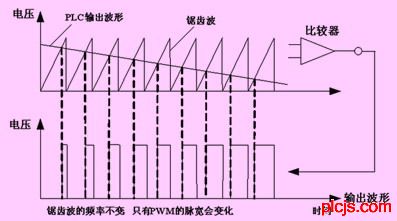
图5 pwm产生电路的动作特性
可见,只要改变脉冲的占空比,就可以改变电机的转速。因此,pwm调速系统的工作原理可以描述为:加减速信号控制plc输出相应的变化信号,正反转信号控制plc输出信号1和输出信号2的波形,即当正转信号给出时,plc输出信号1为与加减速信号相应的变化信号,与锯齿波经比较器比较后产生相应占空比的pwm,plc输出信号2为一个恒压信号,与锯齿波比较后产生“0”;当反转信号给出时,plc输出信号2为与加减速信号相应的变化信号,与锯齿波经比较器比较后产生相应占空比的pwm,plc输出信号1为一个恒压信号,与锯齿波比较后产生“0”。所以当正转信号给出时,pwm1为“pwm”,pwm2为“0”,则电机正转,并可通过改变加减速信号来改变pwm的占空比以实现调速;当反转信号给出时,pwm1为“0”,pwm2为“pwm”,则电机反转,同样可通过改变加减速信号来改变占空比以实现调速。
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!