点击: 作者:未知
操作控制方式:
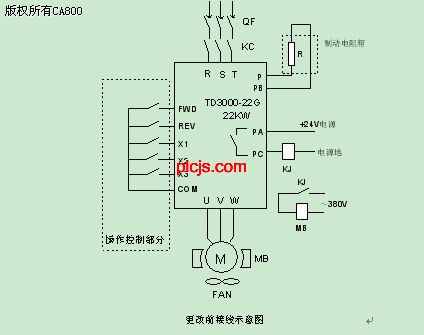
行车操作室内有两个凸轮控制器,分别控制:主钩、摆臂回转、小车前后操作。系统采用变频电机自带的电磁抱闸。起升主钩凸轮控制器能实现主钩以4种不同速度起落和回零,采用多段速控制,没有安装编码器,即:变频器采用无速度传感器矢量控制。与大连普特雷工沟通了解到,该塔机经过厂家标准负荷测试验收后才出厂,而且现场已运行使用1个多月,所以,认为大体工艺参数基本可行,对加/减速、多段频率、电机参量等参数未做任何调整。参数设置如下:
|
序号 WWW_PLCJS@_COM%-PLC-技.术_网 |
功能码 WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户) |
说明 WWW_PLCJS_COM-PLC-技.术_网 |
序号 WWW_PLCJS@_COM%-PLC-技.术_网 |
功能码 WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户) |
说明 P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户 |
|
1 WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户) |
F0.02=0 WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户) |
开环矢量 WWcW_PLCJS_COM-PLC-技.术_网 |
2 WWW.PLCJS.COM——可编程控制器技术门户 |
F0.03=0 WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户) |
键盘数字给定 ——可——编——程——控-制-器-技——术——门——户 |
|
3 WWW_PL※CJS_COM-PLC-技.术_网 |
F0.04=2.0Hz WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户) |
多段速空挡频率 WW.W_PLC※JS_C,OM-PL,C-技.术_网 |
4 WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户) |
F0.05=1 WWW_PLC※JS_COM-PmLC-技.术_网 |
端子控制方式 WWcW_PLCJS_COM-PLC-技.术_网 |
|
5 WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户) |
F0.10=15s WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户) |
加速时间 WWW_PLC※JS_COM-PLC-技.术_网(可编程控※制器技术门户) |
6 WWW_PLCJS@_COM%-PLC-技.术_网 |
F0.11=1s WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户) |
减速时间 WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户) |
|
7 WW.W_PLC※JS_C,OM-PL,C-技.术_网 |
F1.06=2 WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户) |
电机保护为变频 ——可——编——程——控-制-器-技——术——门——户 |
8 WW.W_PLC※JS_C,OM-PL,C-技.术_网 |
F1.08=0 WWW.PLCJS.COM——可编程控制器技术门户 |
电机预励磁无效 WWcW_PLCJS_COM-PLC-技.术_网 |
|
9 W1WW_P4LCJS_COM-PLC-技.术_网 |
F2.01=0.0Hz WWW_P※LCJS_CO※M-PLC-技-.术_网 |
启动频率为0 WWW.PLCJS.COM——可编程控制器技术门户 |
10 WWW.PLCJS.COM——可编程控制器技术门户 |
F2.35=4KHz WWW_PL※CJS_COM-PLC-技.术_网 |
载波频率 WWW_P※LCJS_COM-PLC-)技.术_网 |
|
11 W1WW_P4LCJS_COM-PLC-技.术_网 |
F2.39=0 P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户 |
过压失速禁止 WWW_PLC※JS_COM-PmLC-技.术_网 |
12 WWW_PLCJ-S_COM-PLC-技.术_网(可-编程控-制器技术-门户) |
F2.41=180% plcjs.技.术_网 |
过流失速点 W1WW_P4LCJS_COM-PLC-技.术_网 |
|
13 WWW_PLC※JS_COM-PmLC-技.术_网 |
F3.00=2.0 ——可——编——程——控-制-器-技——术——门——户 |
ASR比例增益1 WWW_P※LCJS_CO※M-PLC-技-.术_网 |
14 WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户) |
F3.01=1.0s WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户) |
ASR积分时间1 WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户) |
|
15 P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户 |
F3.02=4.0 WWW_PLCJS_COM-PLC-技.术_网 |
ASR比例增益2 WWW_P※LCJS_COM-PLC-)技.术_网 |
16 WWW_PLCJS_COM-PLC-技.术_网 |
F3.03=0.5s WW.W_PLC※JS_C,OM-PL,C-技.术_网 |
ASR积分时间2 WWW_PLCJS@_COM%-PLC-技.术_网 |
|
17 WWW_PLCJS@_COM%-PLC-技.术_网 |
F3.07=180% WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户) |
电动转矩限定 WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户) |
18 P.L.C.技.术.网——可编程控制器技术门户 |
F3.08=180% WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户) |
制动转矩限定 WW.W_PLC※JS_C,OM-PL,C-技.术_网 |
|
19 WWW_P※LCJS_COM-PLC-)技.术_网 |
F5.01=1 WWcW_PLCJS_COM-PLC-技.术_网 |
多段速端子1 ——可——编——程——控-制-器-技——术——门——户 |
20 WWW_P※LCJS_CO※M-PLC-技-.术_网 |
F5.02=2 WWW※PLCJS_COM-PL#C-技.术_网(可编※程控※制器技术门户) |
多段速端子2 WW.W_PLCJS_COM-PLC-技.术_网 |
|
21 WWW_P※LCJS_CO※M-PLC-技-.术_网 |
F5.03=3 WWW_PLCJS※COM-PLC-技.术_网(可※编程控※制器技术门户) |
多段速端子3 ——可——编——程——控-制-器-技——术——门——户 |
22 WWW_PLC※JS_COM-PmLC-技.术_网 |
F5.11=4 WWW_PLCJS_COM-PLC-技.术_网 |
FDT到达端子 P.L.C.技.术.网——可编程控制器技术门户 |
|
23 WWW_PLCJS_COM-PLC-技.术_网 |
F5.15=4% W1WW_P4LCJS_COM-PLC-技.术_网 |
FDT频率设定 P_L_C_技_术_网——可——编——程——控-制-器-技——术——门——户 |
24 WWcW_PLCJS_COM-PLC-技.术_网 |
F5.16=0.5% WWcW_PLCJS_COM-PLC-技.术_网 |
FDT滞回带 P.L.C.技.术.网——可编程控制器技术门户 |
|
25 WWW_P※LCJS_COM-PLC-)技.术_网 |
FA.11=5 WWW_PLCJS※COM-PLC-技×术_网(可编程控※制器技术门户) |
WWW_PLCJS_COM-PLC-技.术_网 |
WW.W_PLCJS_COM-PLC-技.术_网 |
WWW_PLCJS_COM-PLC-技.术_网 |
经过参数调整后,空车试机,启动时的最大电流为40A多一点,基本在额定值范围内;然后,带载运行,最大起吊了2个绞架,大约2吨重的物件,反复起吊,启停过程非常正常,电流平稳,工作电流只有18A左右,多次操作后,甲方认为非常满意,未再继续调整。从整个提升部运行情况来看,我司TD3000在主提升上表现性能优异,启动/停止非常平稳,与抱闸配合良好,冲击非常小。
L
C
技
术
网
|
可
编
程
控
制
器
技
术
门
户
|
十
万
P
L
C
工
程
师
的
共
同
选
择
!